簡易型ユニバーサルジョイントを2つ組み合わせた場合の解析を行います。正規型ユニバーサルジョイントを2つ組み合わせた図と同様のものを下記に示します。
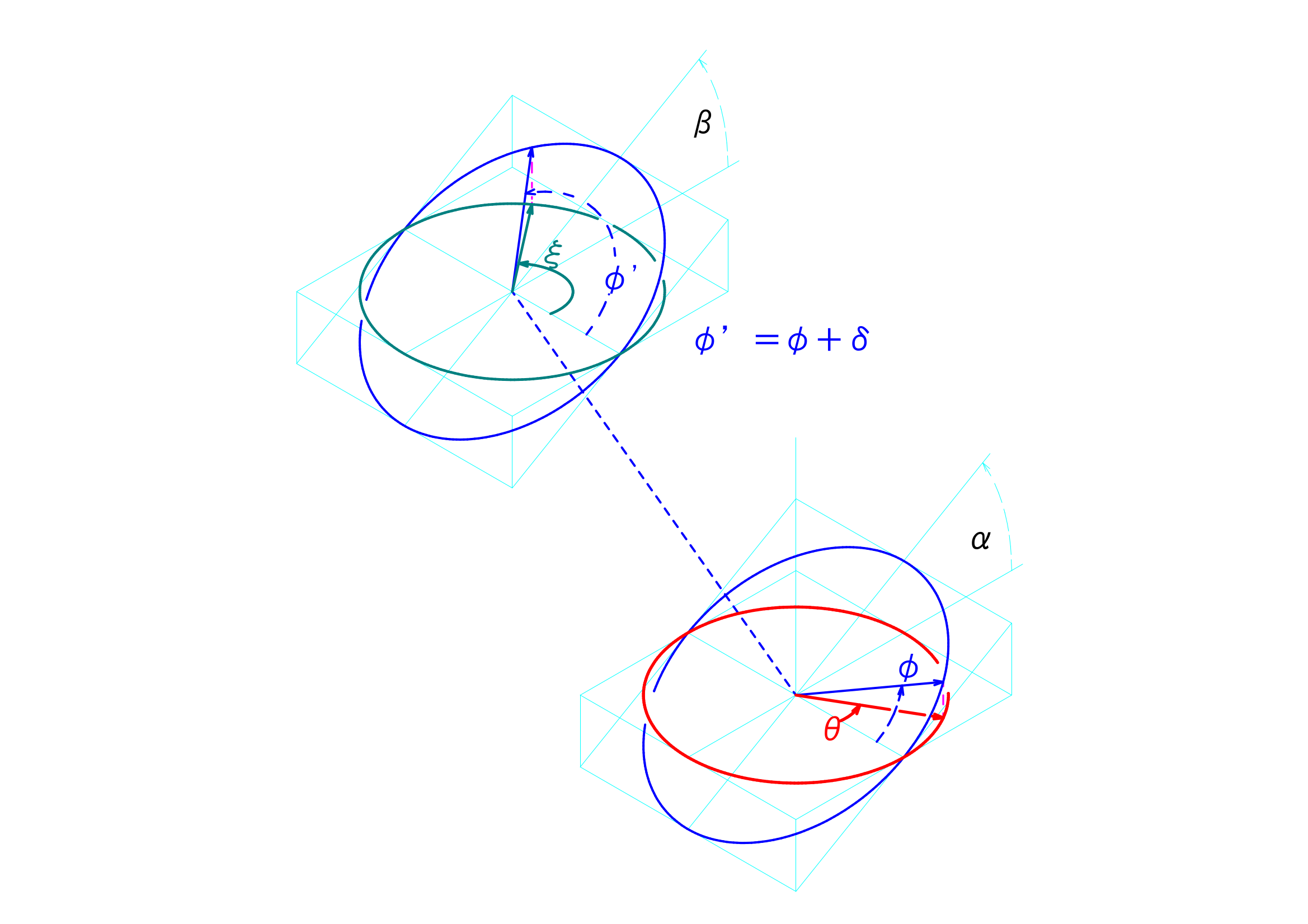
前回の議論から、駆動面(赤の円)を移動する基準点の\(x\)軸に対する角度\(\theta\)と、伝達面(青の楕円)を移動する基準点の\(x\)軸に対する角度\(\varphi\)との間には次のような関係が成立します。
\(tan(\varphi) = tan(\theta)\cdot\frac{1}{cos(\alpha)}\)
中継面(もう一つの青の楕円)を移動する基準点の\(x\)軸に対する角度\(\varphi^\prime\)と、最終伝達面(緑の円)を移動する基準点の\(x\)軸に対する角度を\(\xi\)とすると、\(\theta\)と\(\varphi\)との関係と同じ考え方で、
\(tan(\varphi^\prime) = tan(\xi)\cdot\frac{1}{cos(\beta)}\)
を得ることができます。
一点細かいことを補足しておくと、正規型ユニバーサルジョイントでは、動力を受ける側も伝える側も対称の関係にありましたので、\(\beta\)は、中継面(上の青い円)を基準とした角度としていましたが、簡易型ユニバーサルジョイントは対称ではありませんので、最終伝達面(上の緑の円)を基準とした角度としています。
さて、\(tan(\alpha+\beta)=\frac{tan(\alpha)+tan(\beta)}{1-tan(\alpha)\cdot tan(\beta)}\)でしたので、
\(tan(\varphi^\prime) = tan(\varphi +\delta) = \frac{tan(\varphi)+tan(\delta)}{1-tan(\varphi)\cdot tan(\delta)}\)
となり、\(tan(\varphi) = tan(\theta)\cdot\frac{1}{cos(\alpha)}\)を代入し、
\(tan(\varphi^\prime) = \frac{tan(\theta)\cdot\frac{1}{cos(\alpha)}+tan(\delta)}{1-tan(\theta)\cdot\frac{1}{cos(\alpha)}\cdot tan(\delta)}\)
分子と分母とに\(cos(\delta)\cdot cos(\alpha)\)をかけ、
\(tan(\varphi^\prime) = \frac{tan(\theta)\cdot cos(\delta) + sin(\delta)\cdot cos(\alpha)}{cos(\delta)\cdot cos(\alpha)-tan(\theta)\cdot sin(\delta)}\)
最終的に、
\(tan(\xi) = \frac{sin(\delta)\cdot cos(\alpha) + tan(\theta)\cdot cos(\delta)}{cos(\delta)\cdot cos(\alpha)-tan(\theta)\cdot sin(\delta)}\cdot cos(\beta)\)
を得ます。
正規型ユニバーサルジョイントの時と同様に、我々の興味のあるのは、\(\delta=0\)もしくは\(\delta=\frac{\pi}{2}\)の時です。
\(\delta=0\)の時は、下図のとおり、2つのピンが同位相となります。
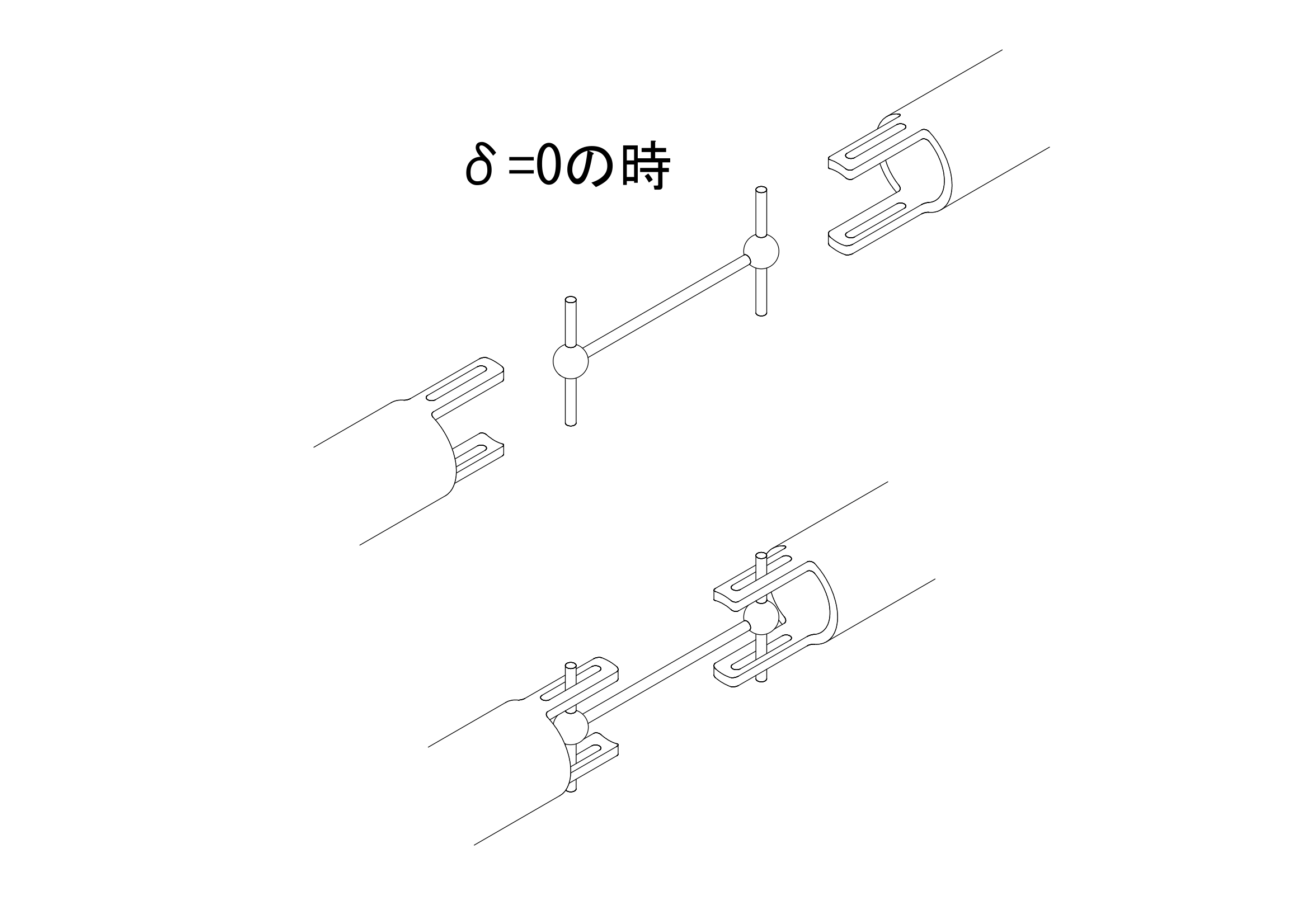
この時、\(sin(\delta)=0\)、\(cos(\delta)=1\)ですので、
\(tan(\xi) = tan(\theta)\cdot \frac{cos(\beta)}{cos(\alpha)}\)
従って、\(|\alpha| = |\beta|\)であれば、\(\theta\)と\(\xi\)とは絶えず同じ角度であることがわかります。
\(\delta=\frac{\pi}{2}\)の時は、下図のとおり、2つのピンの位相が90°ずれます。
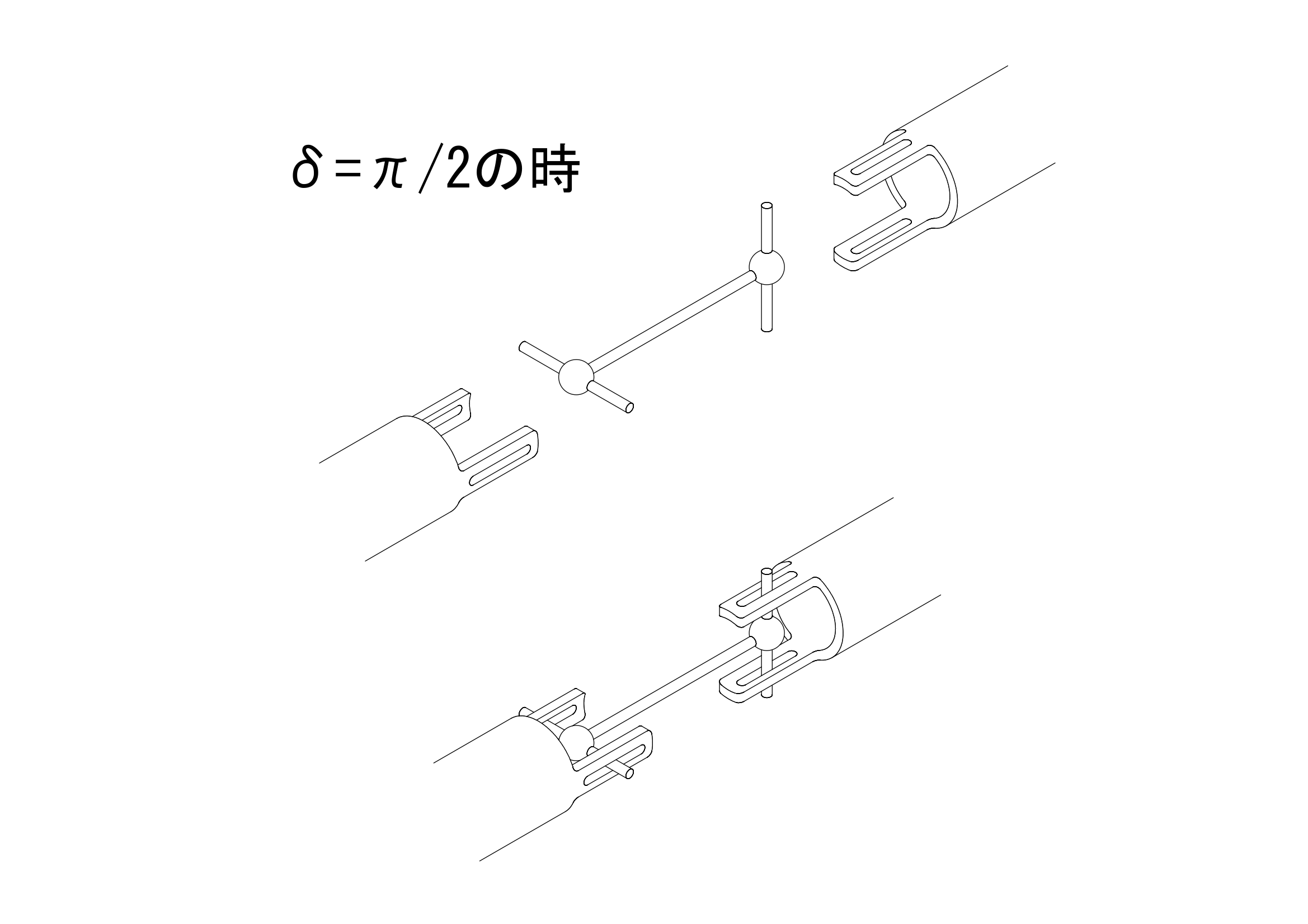
この時、\(sin(\delta)=1\)、\(cos(\delta)=0\)ですので、
\(tan(\xi) = -\frac{1}{tan(\theta)}\cdot cos (\alpha)\cdot cos(\beta)\)
\(= tan(\theta-\frac{\pi}{2})\cdot cos (\alpha)\cdot cos(\beta) \)
という関係を得ます。正規型ユニバーサルジョイントの場合と同様、\(\theta\)と\(\xi\)は、同じ角度ではないことがわかります。