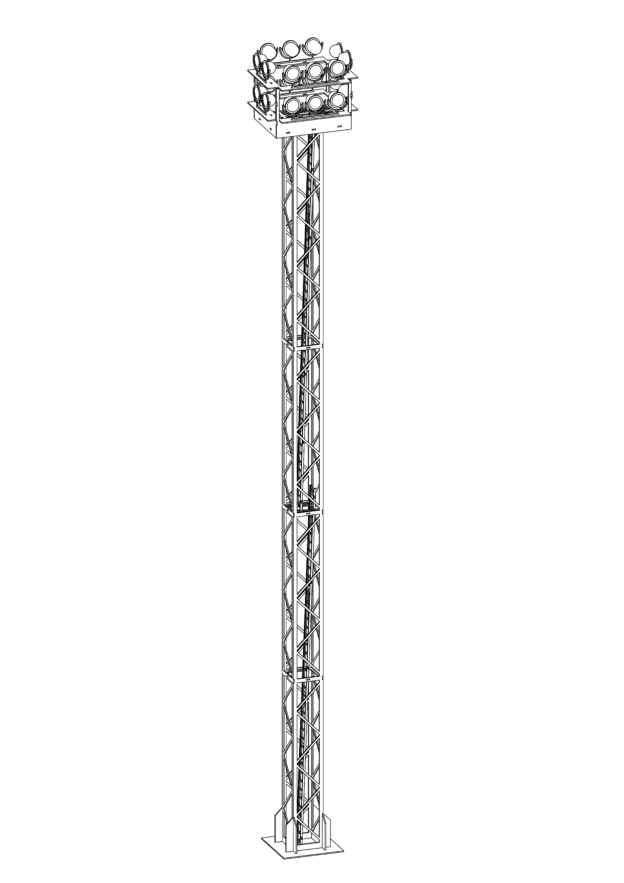
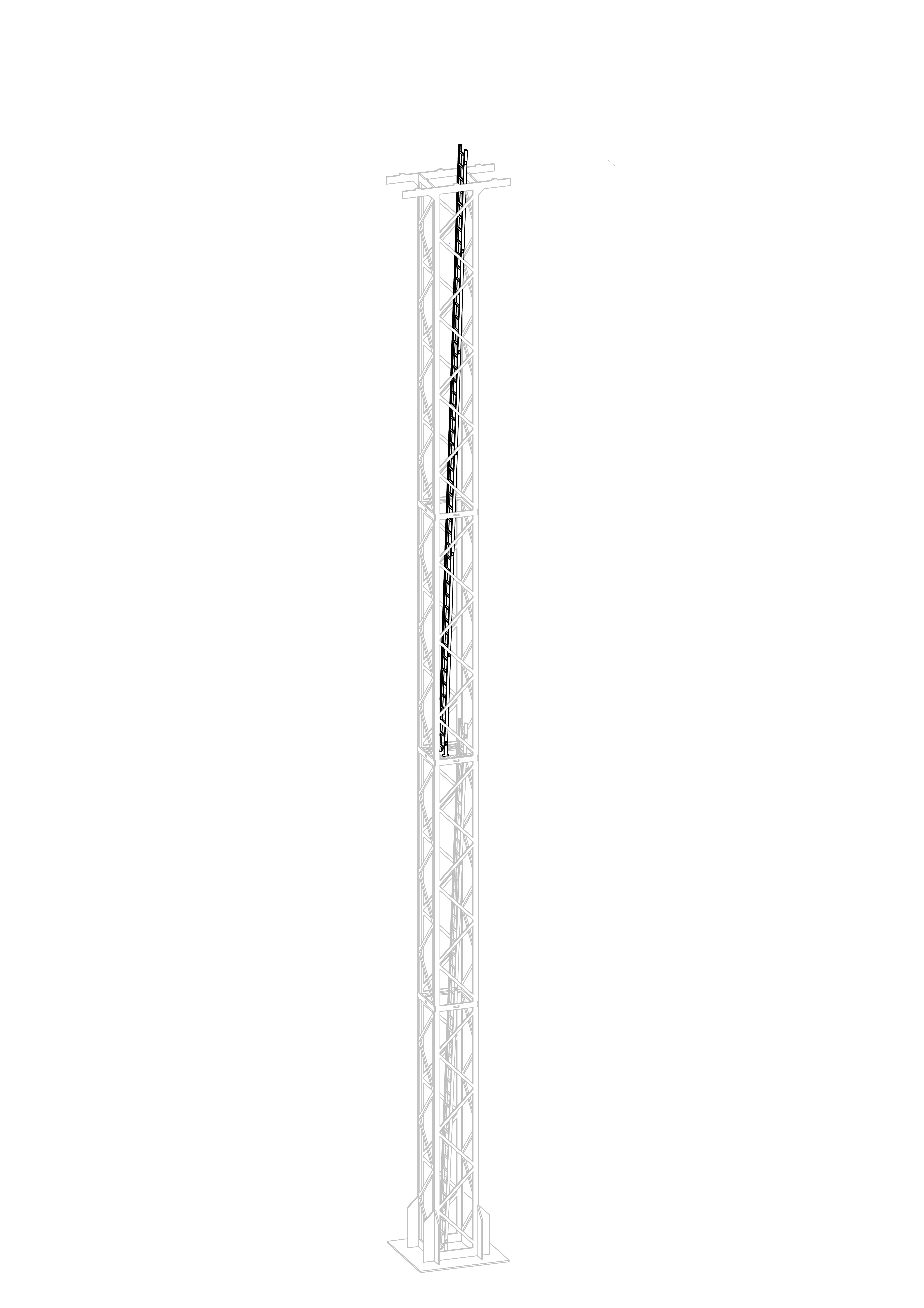
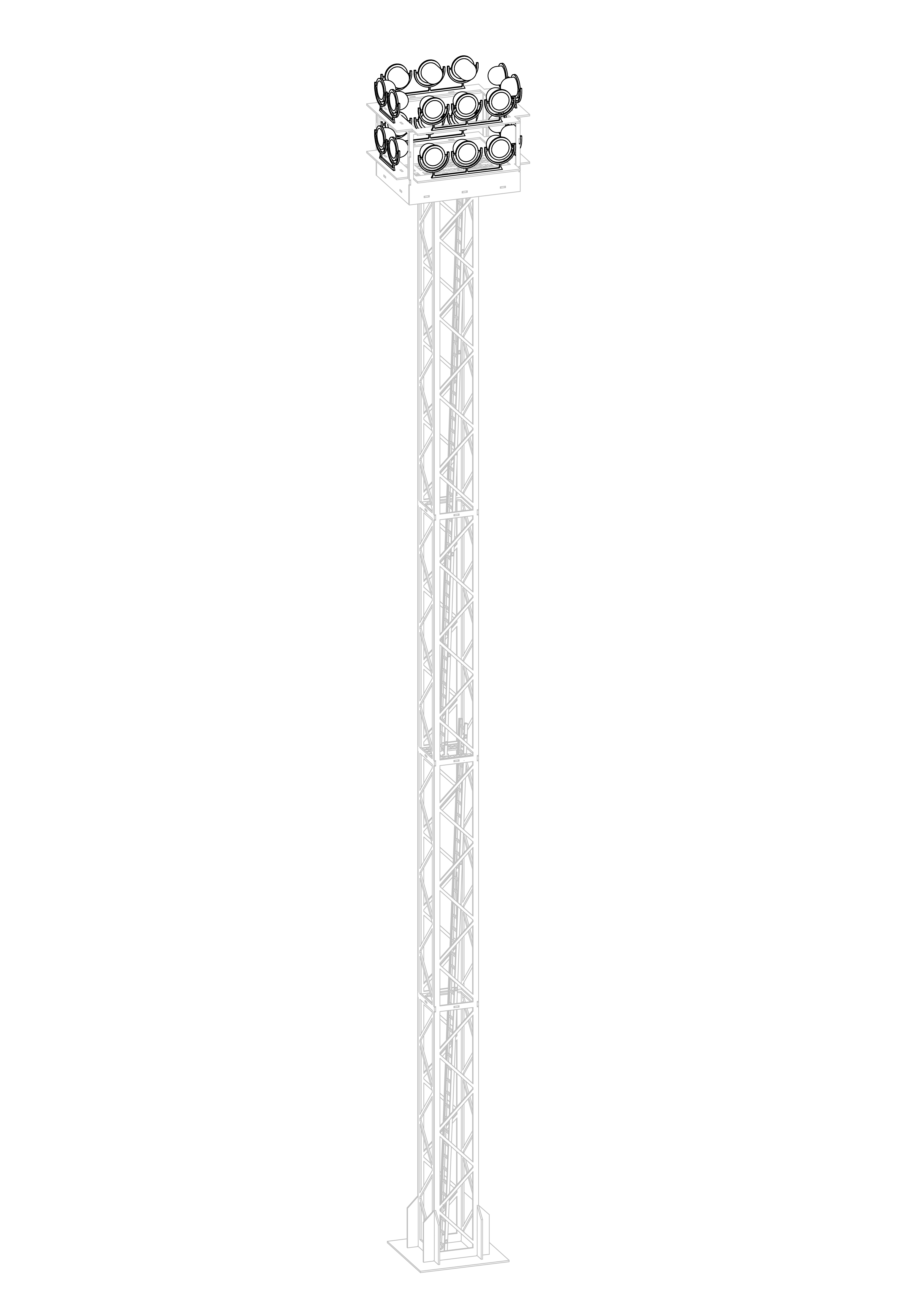
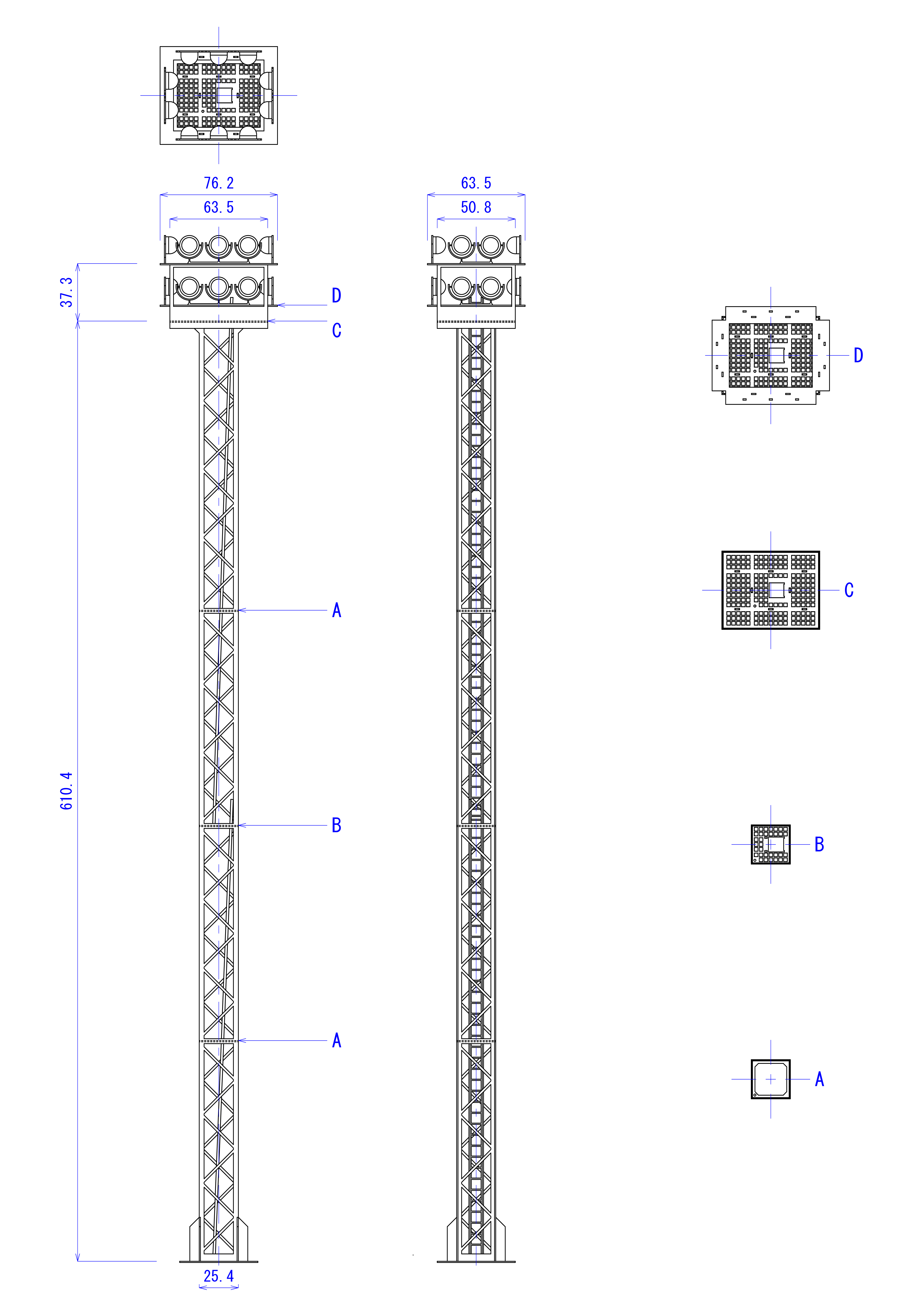
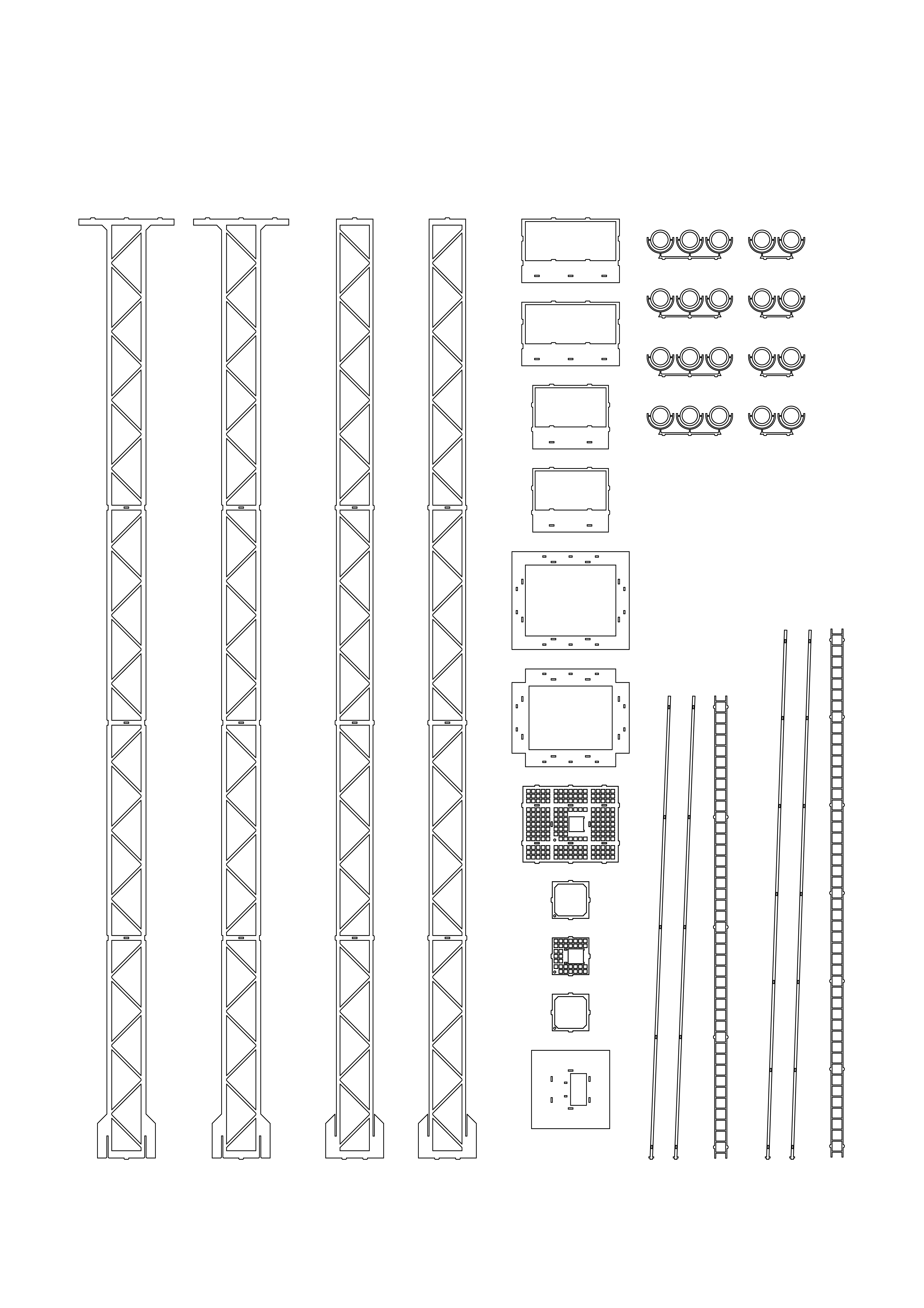
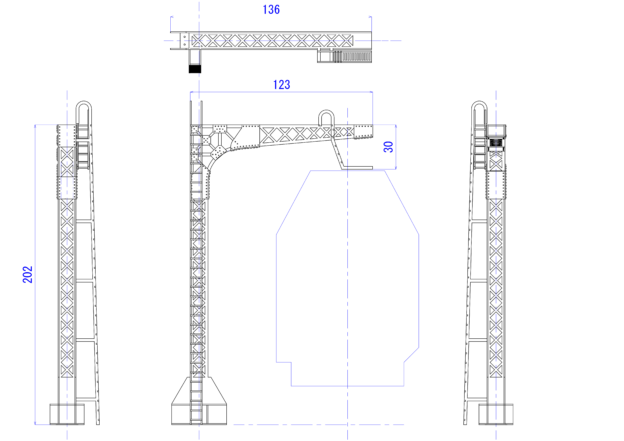
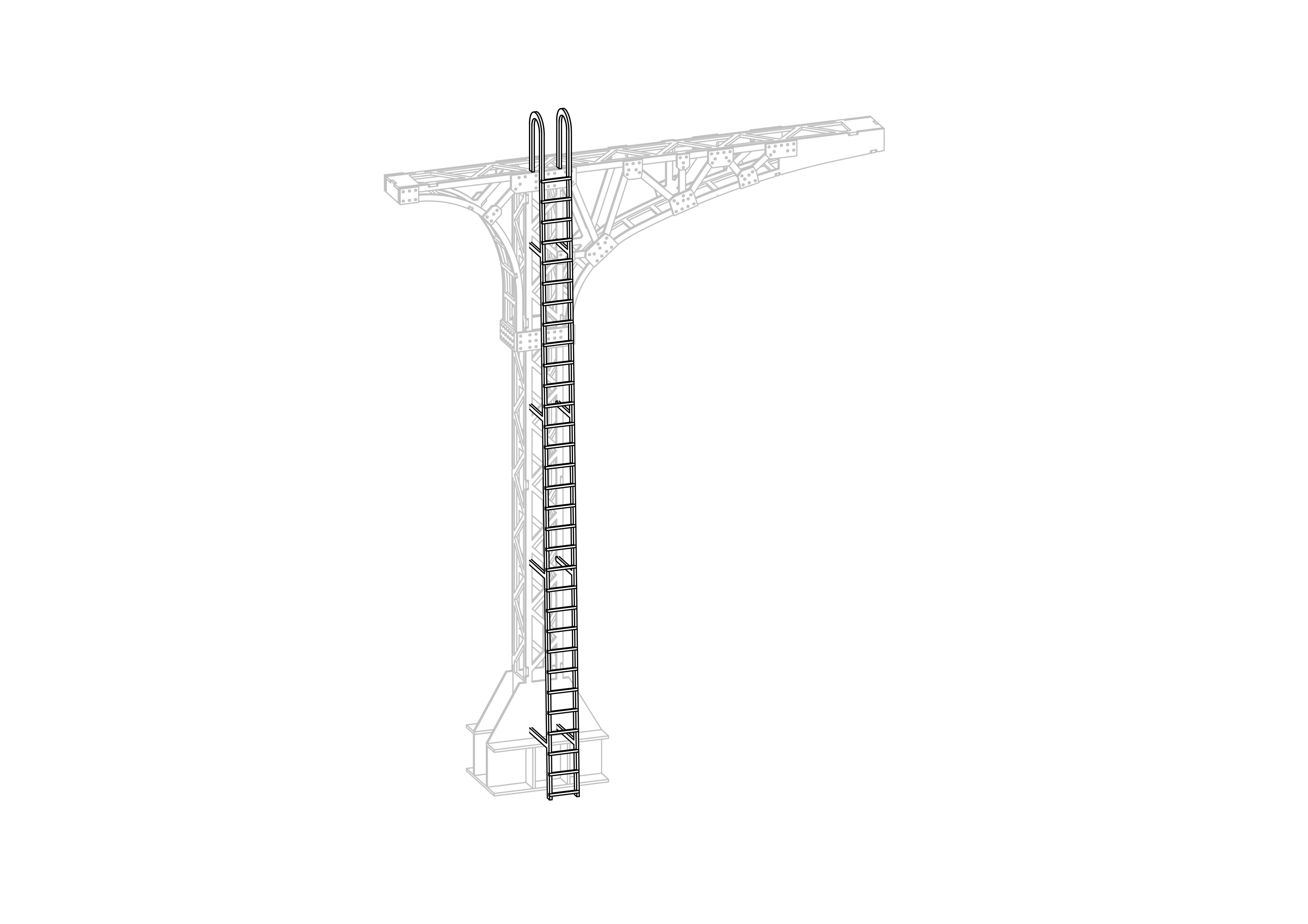
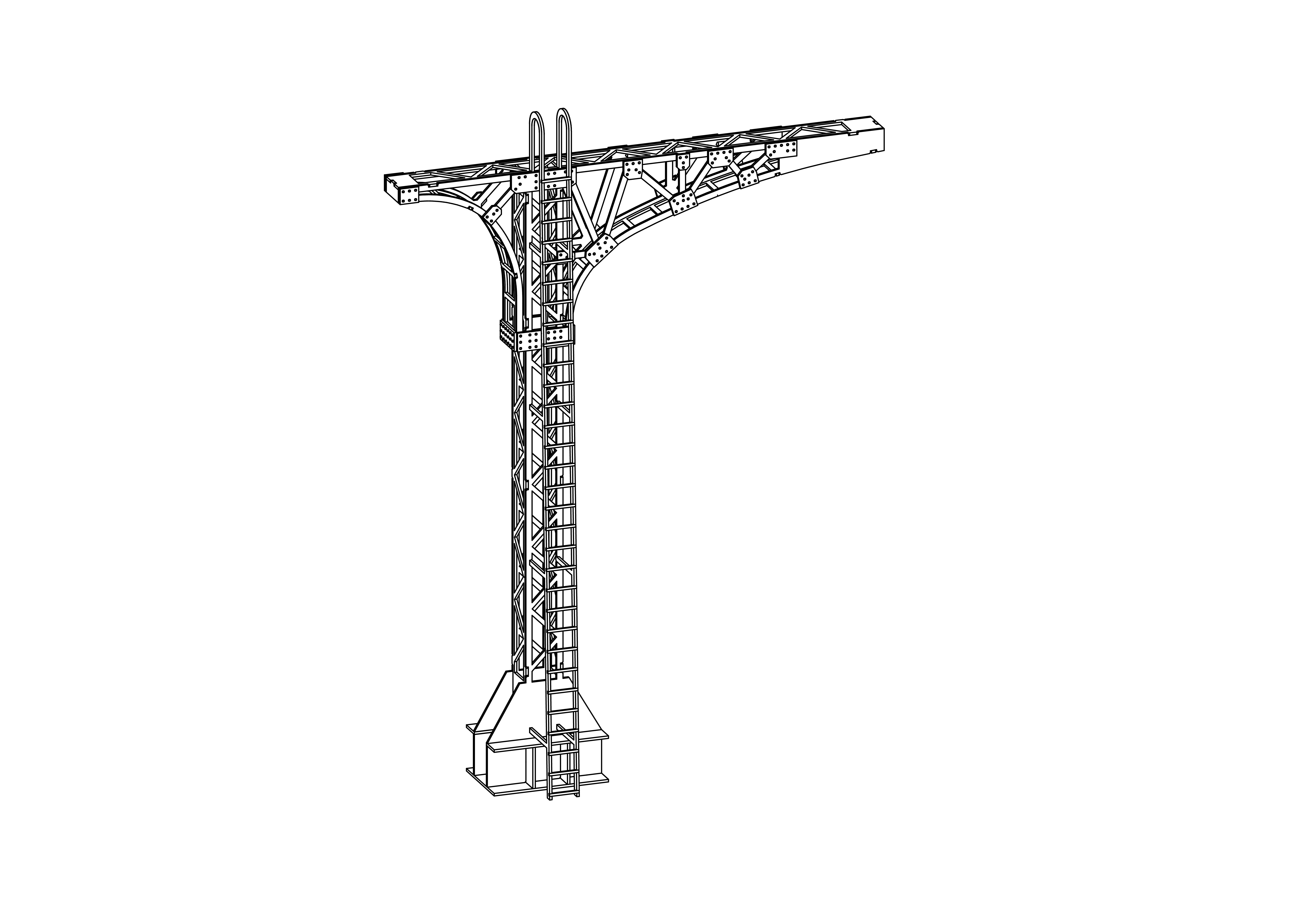
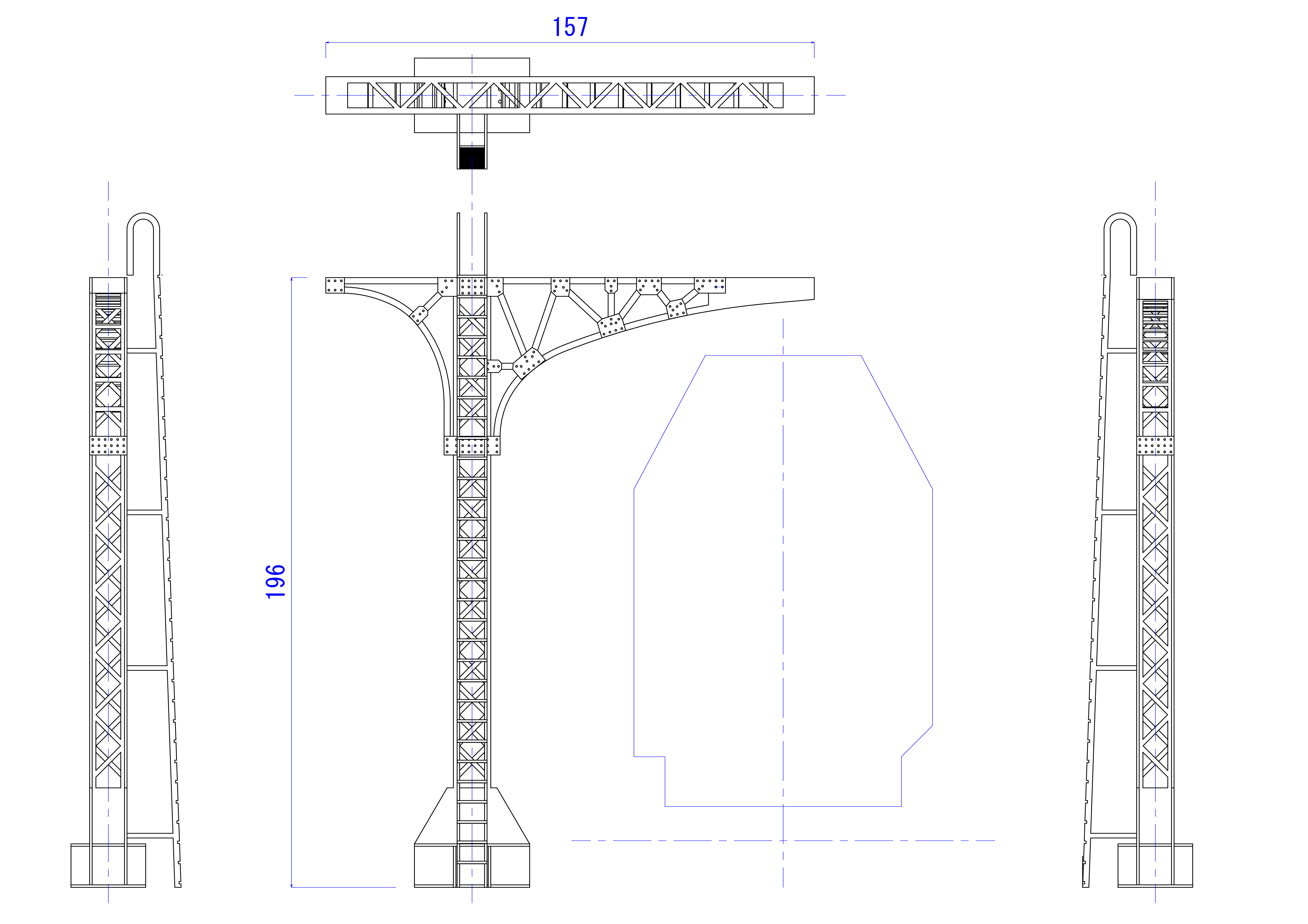
Signal Bridgeができたところで、次はヤードの照明塔を作りたいとのお話をdda40xさんから頂きました。手持ちの詳しい資料はなく、ネット上を検索してもあまりまとまった資料もなく、Cheyenneに立っている次のものを参考にして設計することとしました。
この照明塔は、根元から見上げる角度で見ることができます。
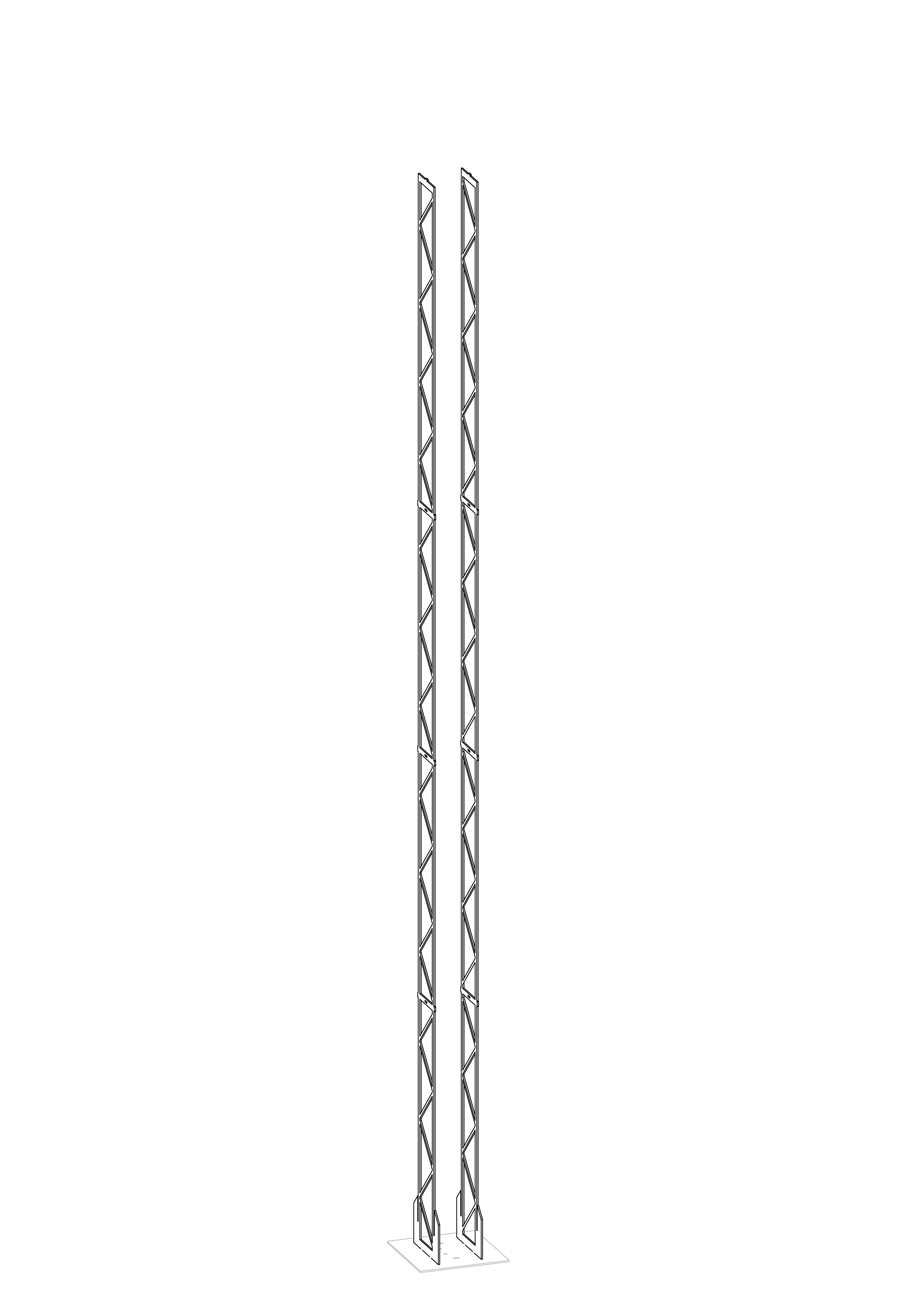
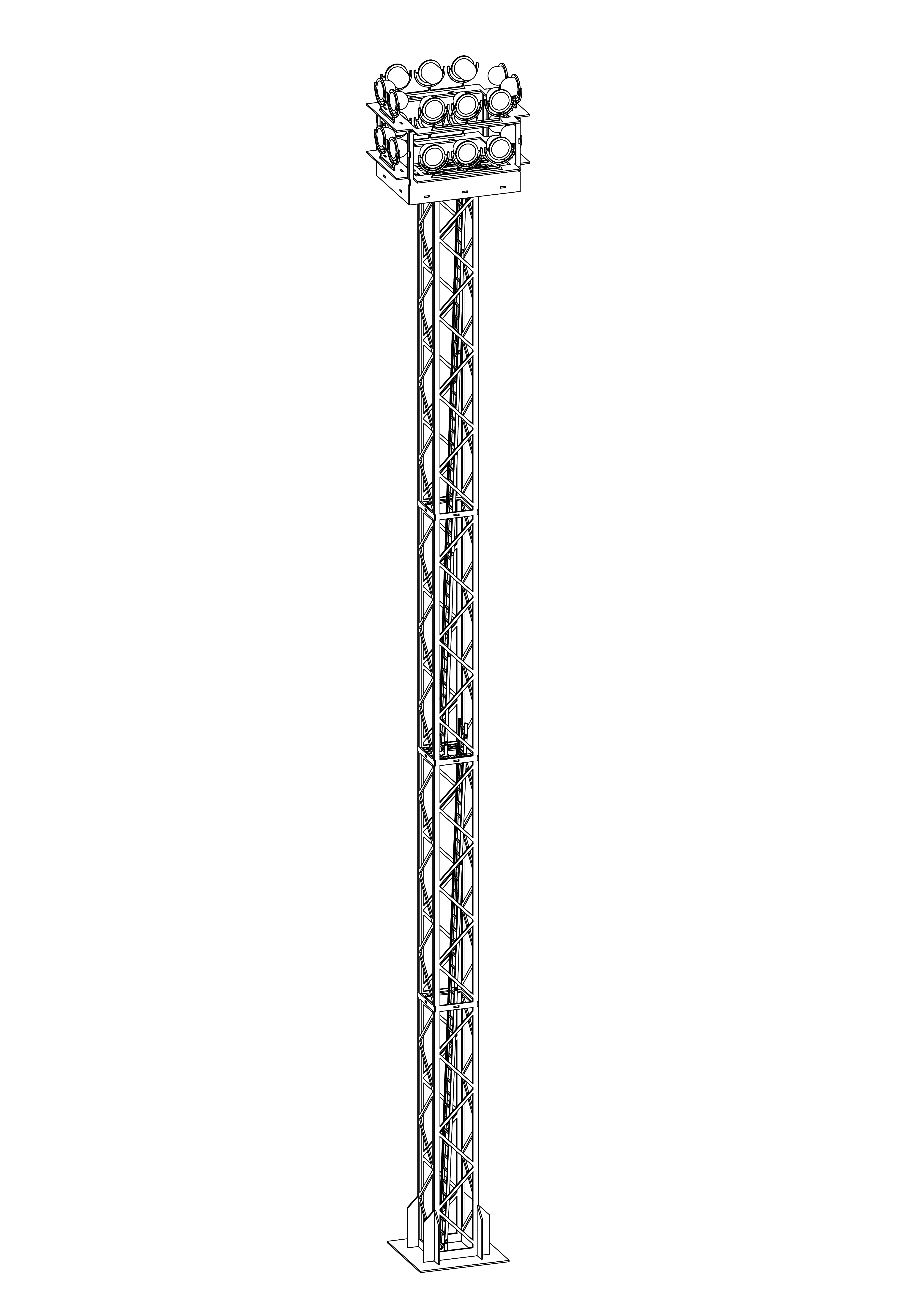
もう一本、トラスの組み方が少し異なるものが近くに立っています。
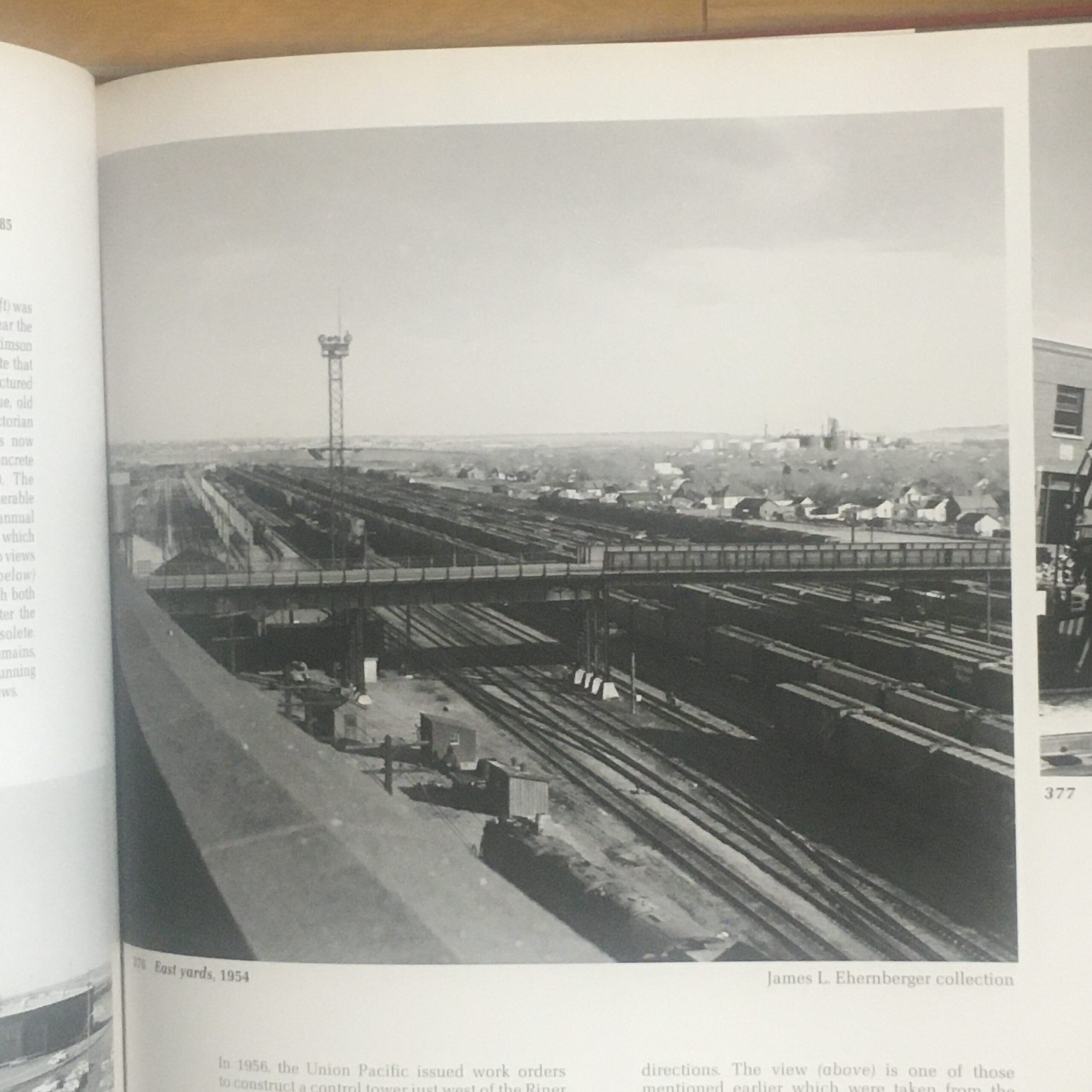
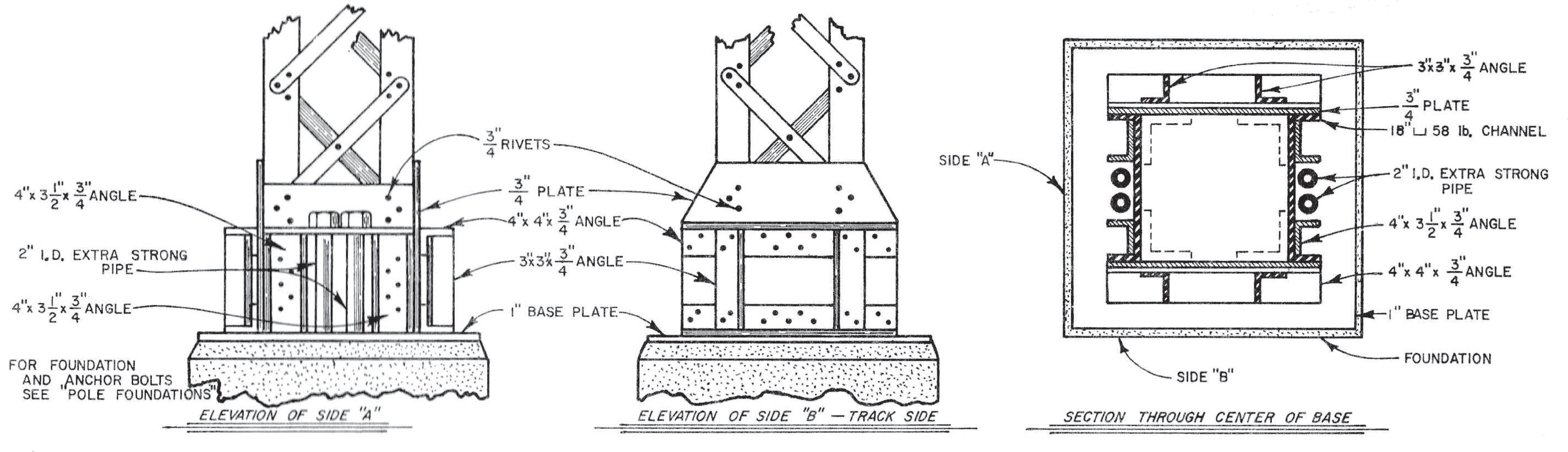
博物館レイアウトは、蒸気の最盛期からディーゼルの第1~第2世代あたりをテーマとしていますので、この形の照明塔がその当時存在したか、という点については、事前に確認しておきました。私の持っているRobert Darwing氏の”History of the Union Pacific Railroad in Cheyenne: A Pictorial Odyssey to the Mecca of Steam” (978-0941421096)をめくってゆくと、1954年当時のCheyenneの写真があり、同型と思われる照明塔が写っています。
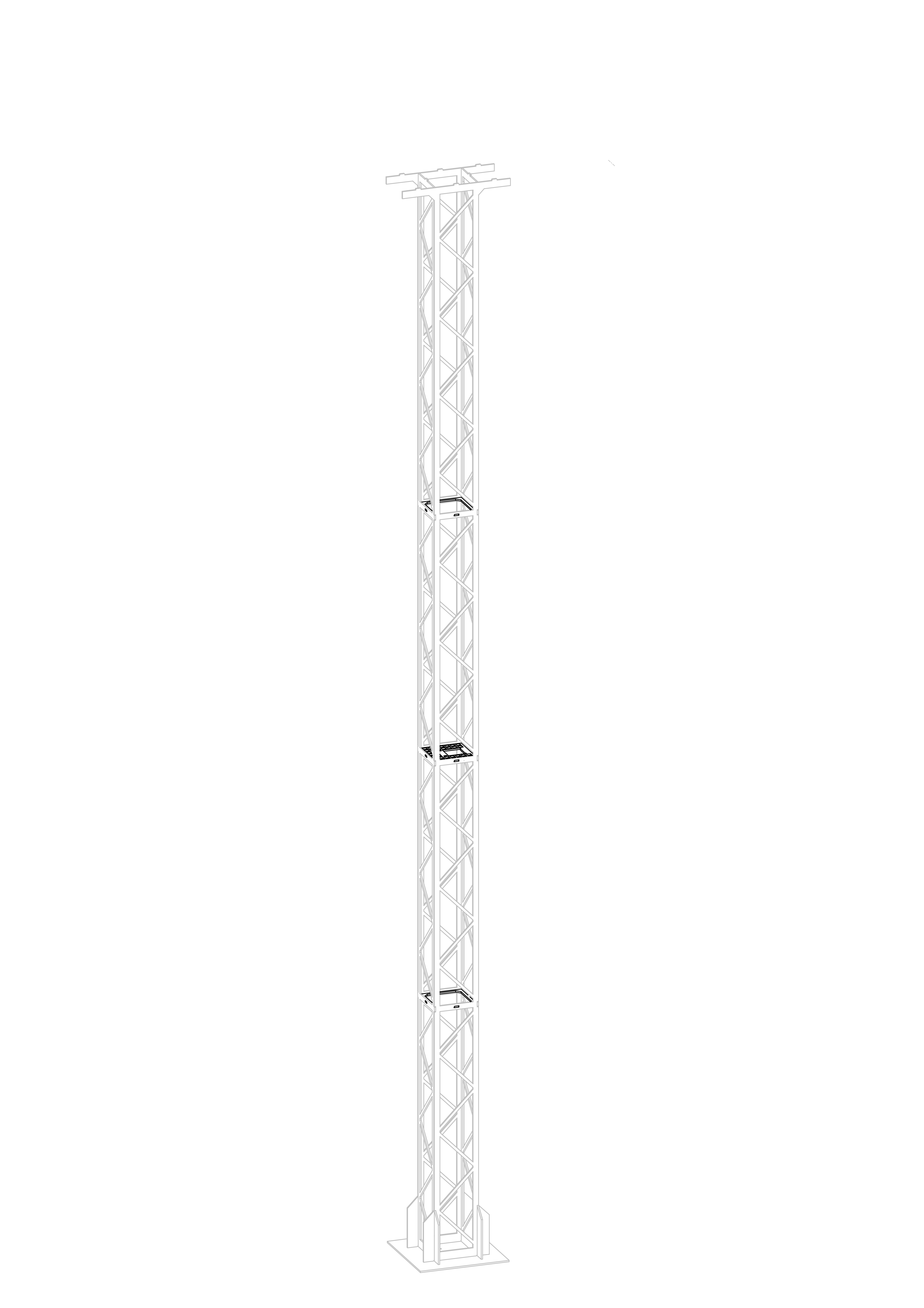
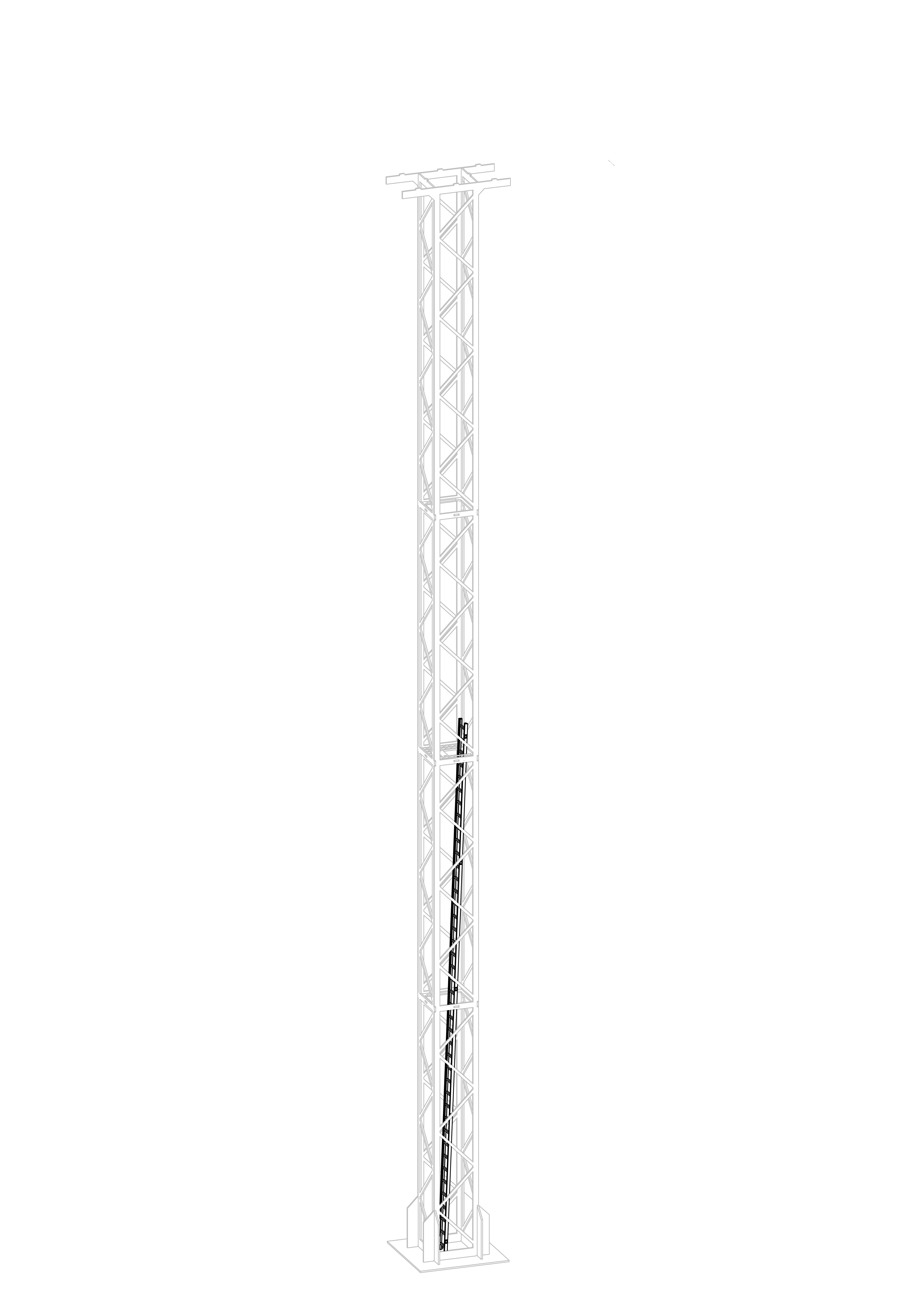
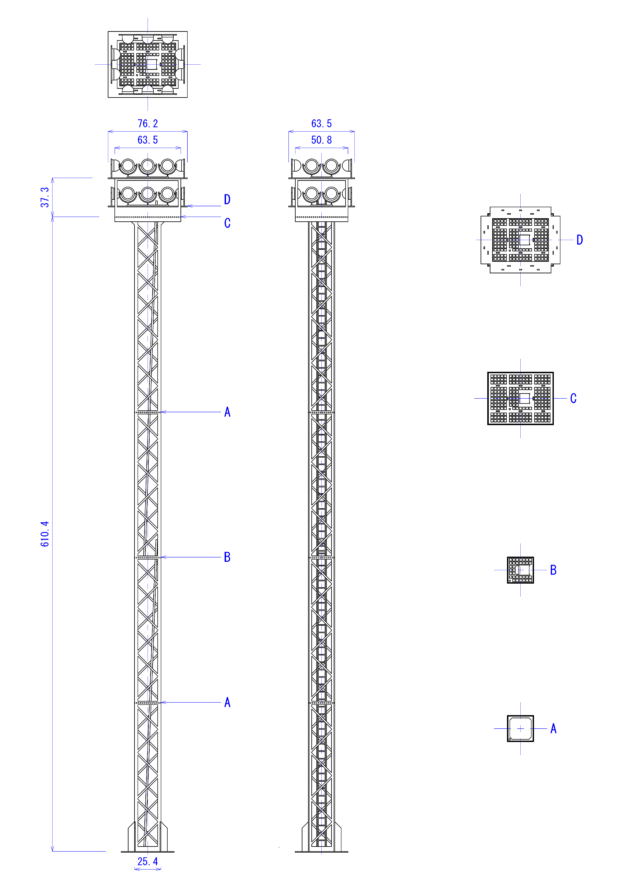
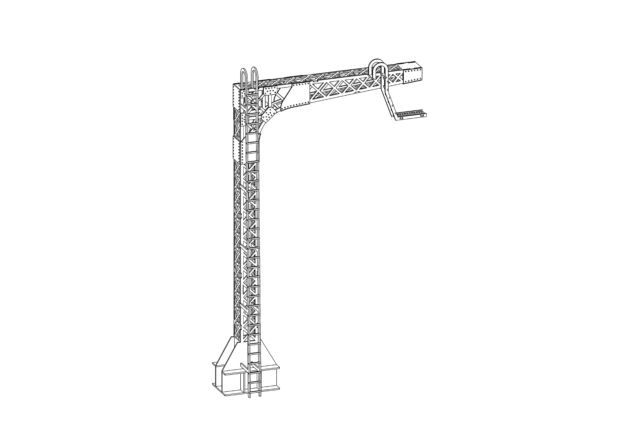
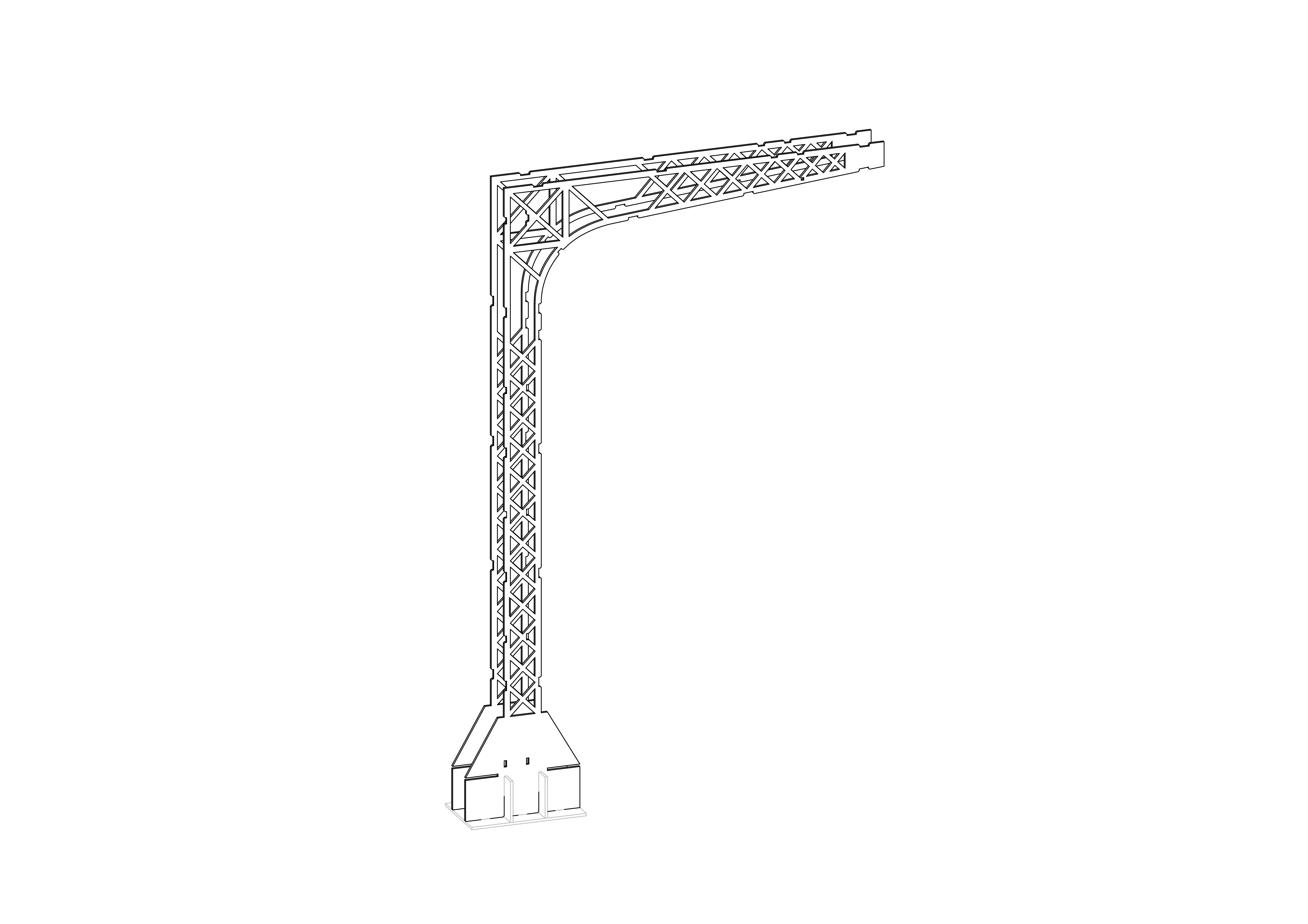
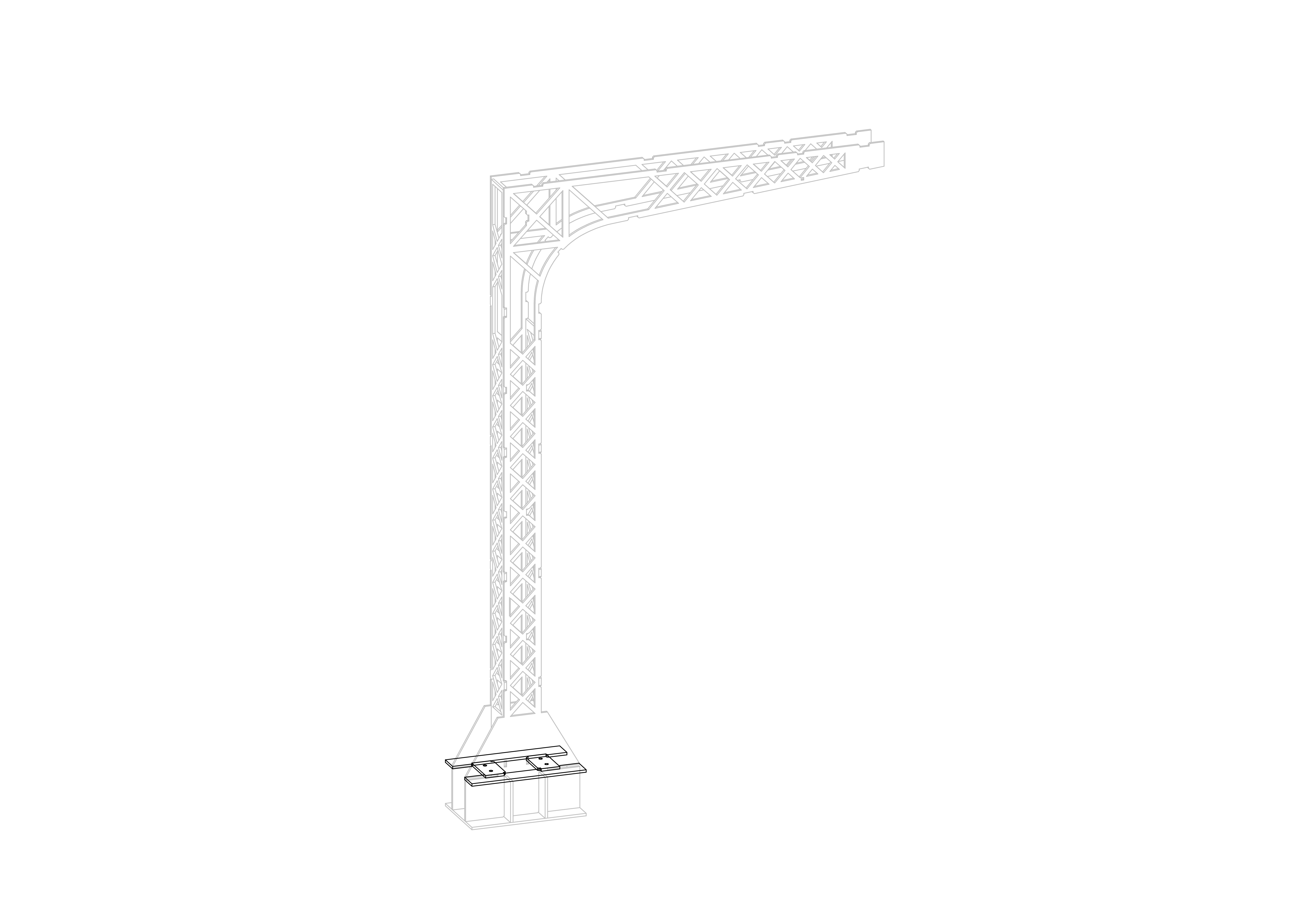
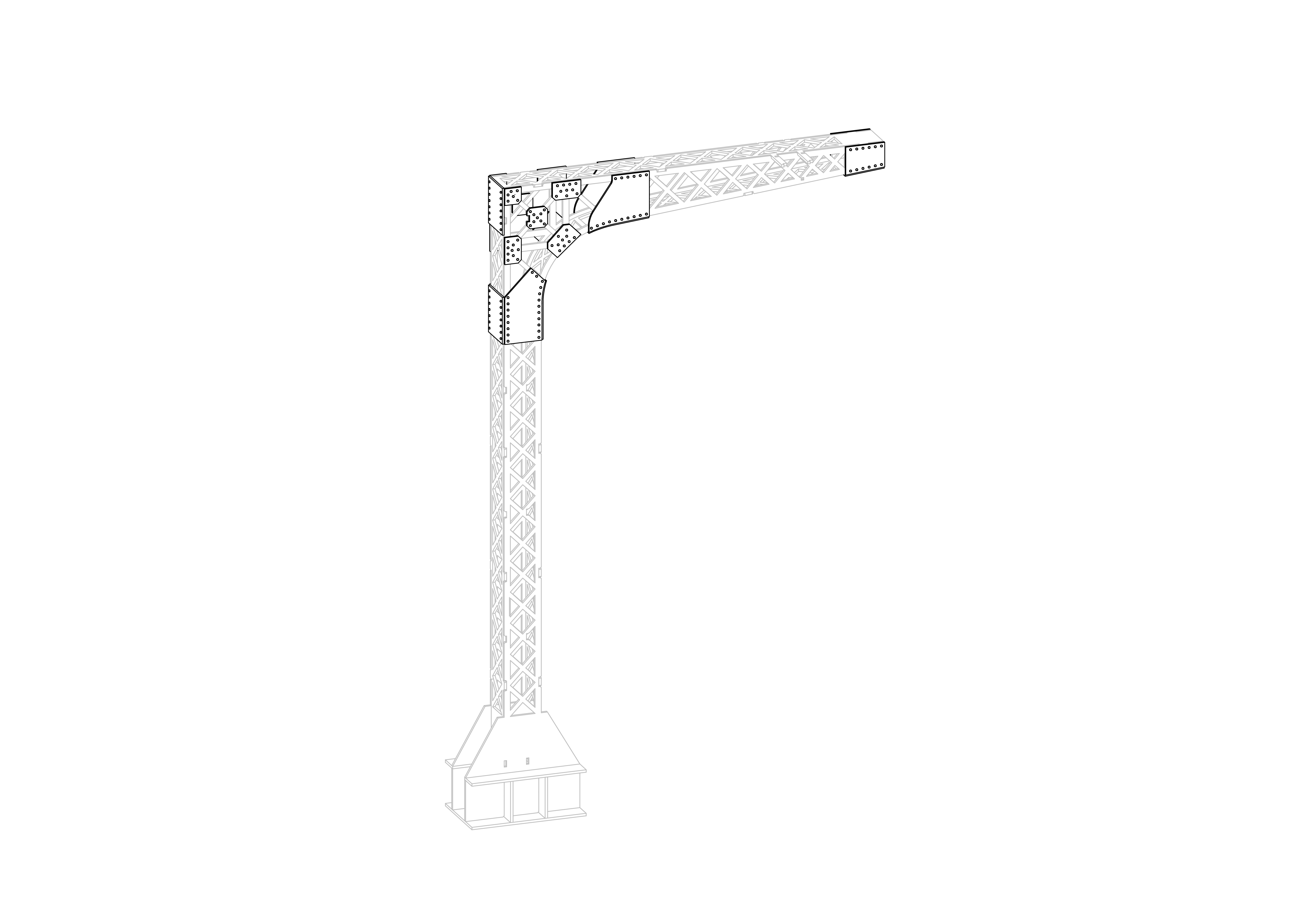
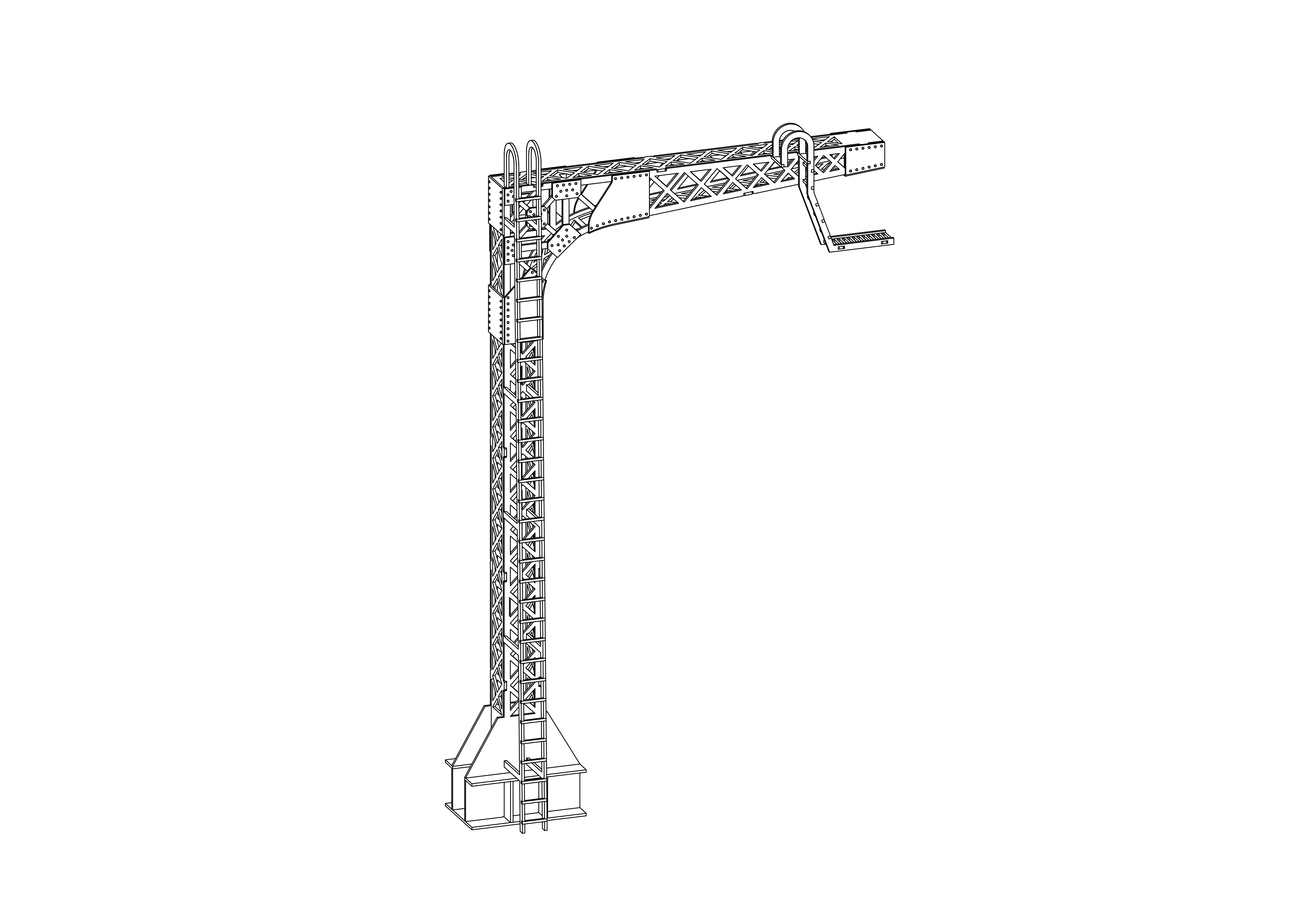
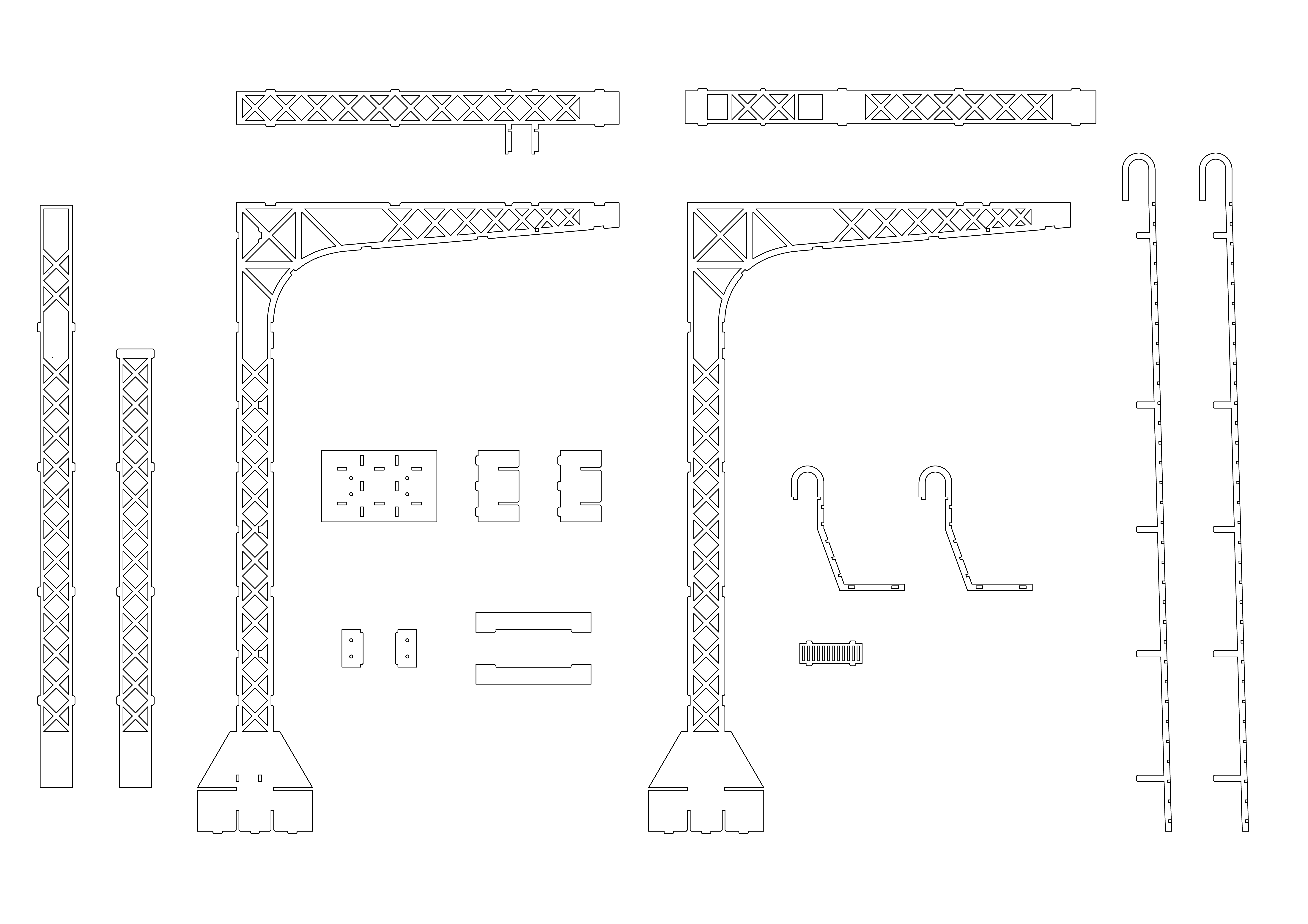
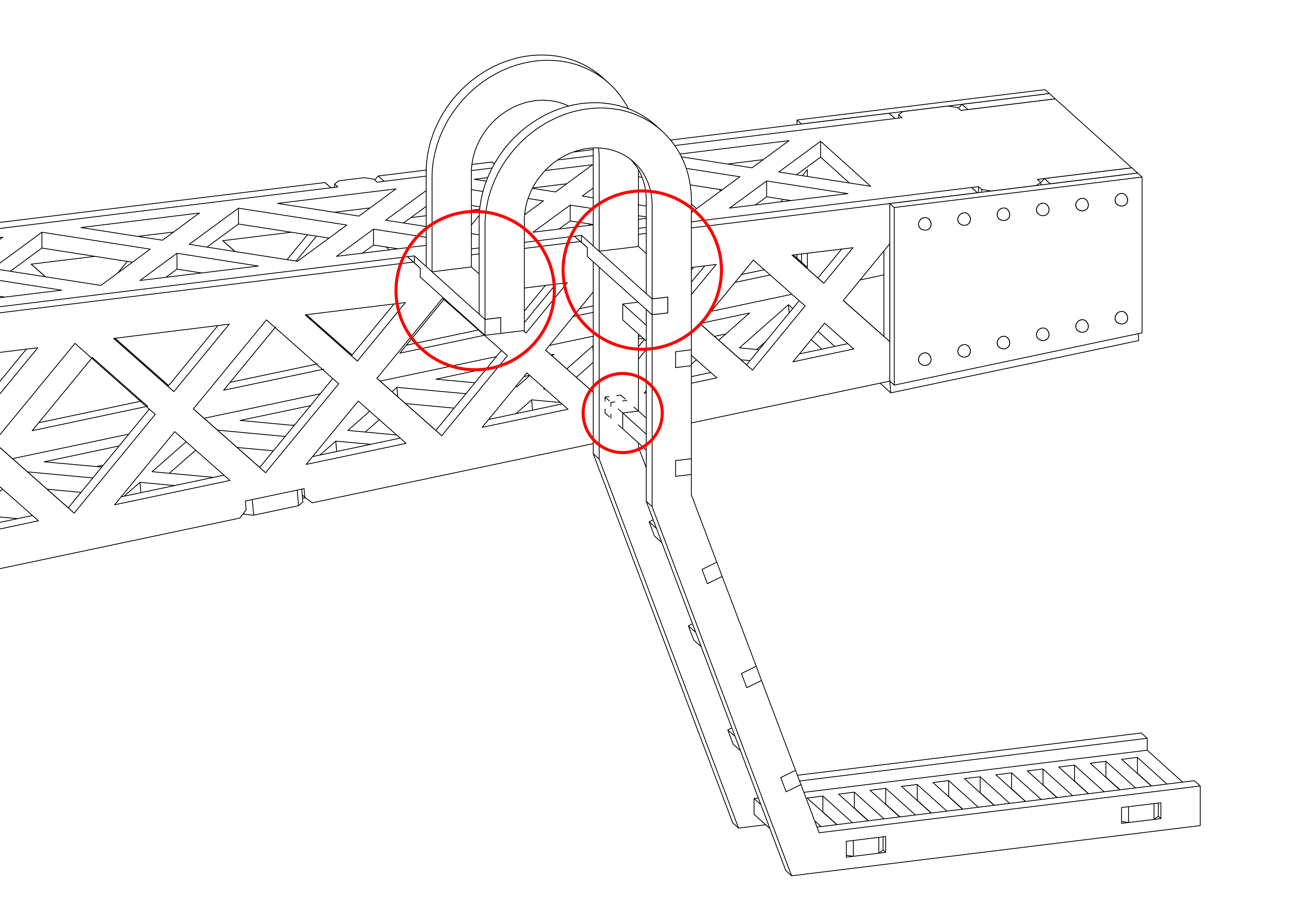
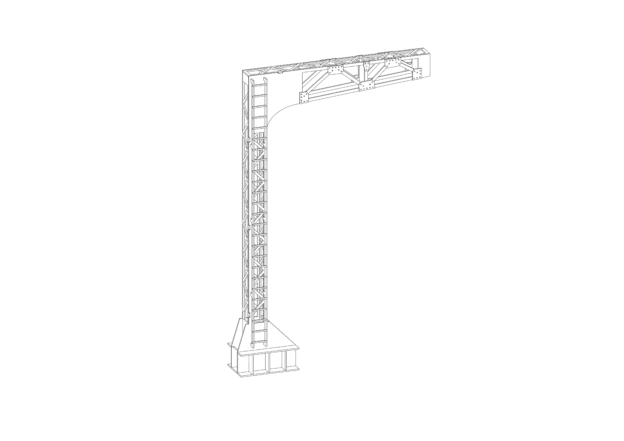
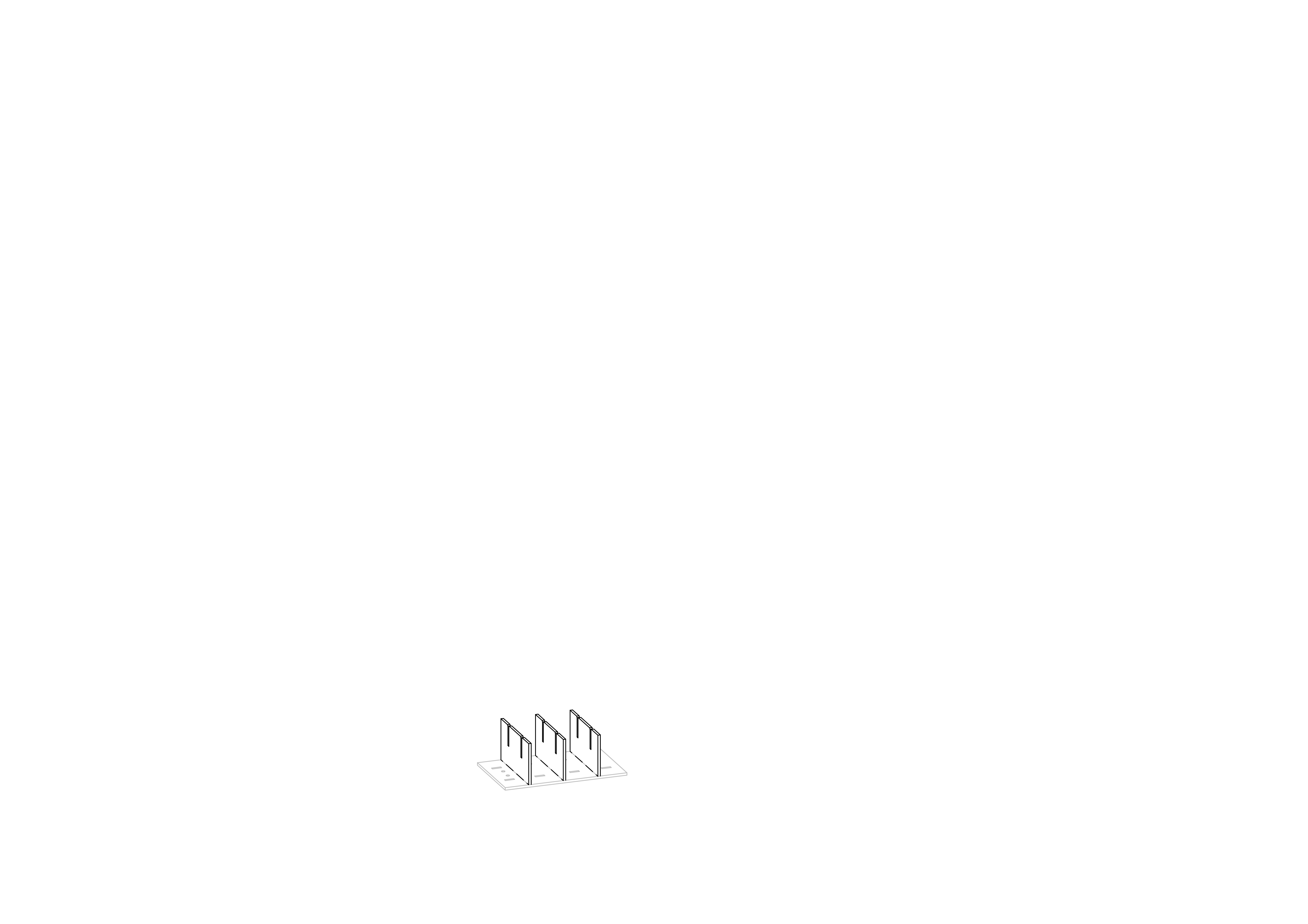
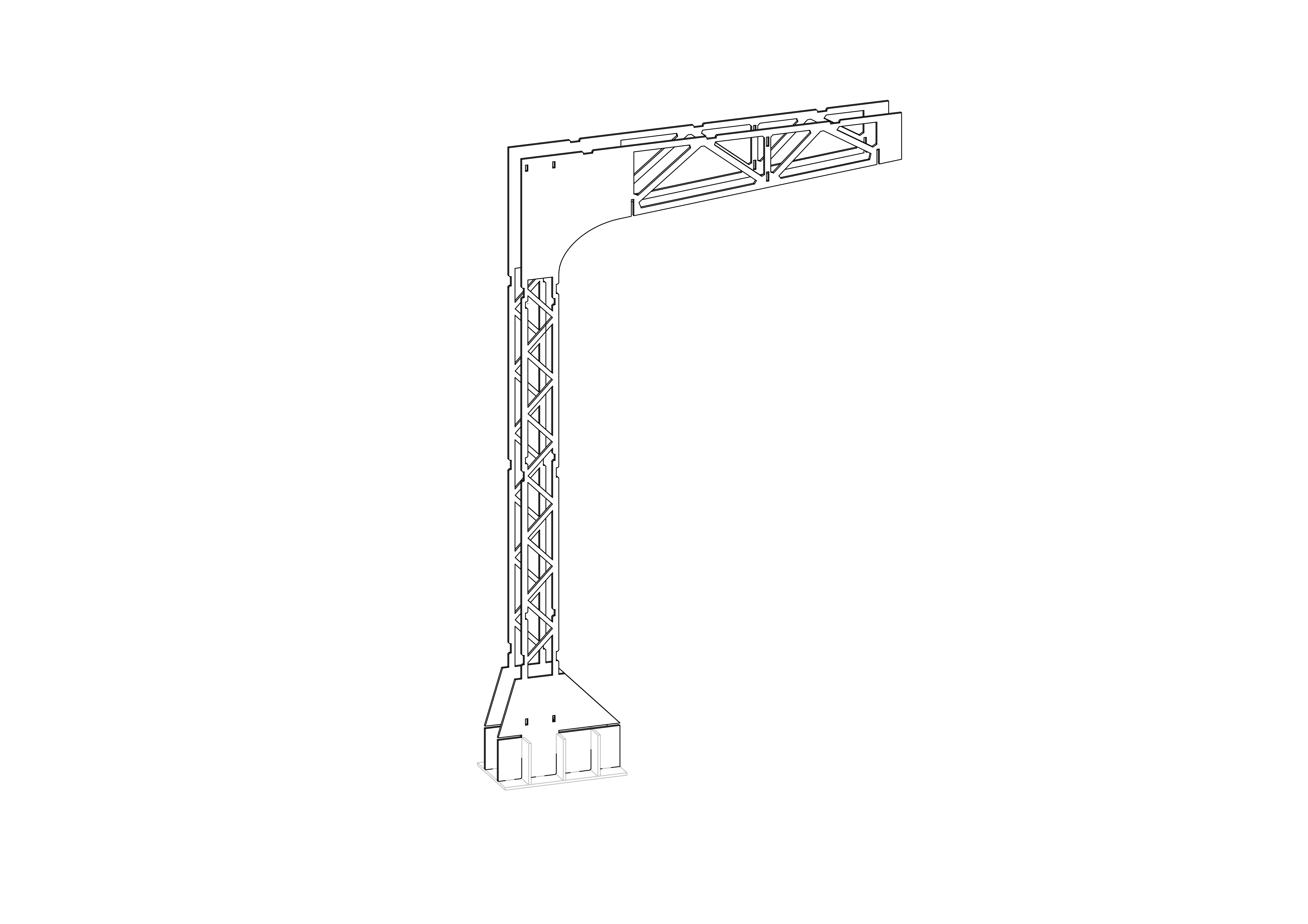
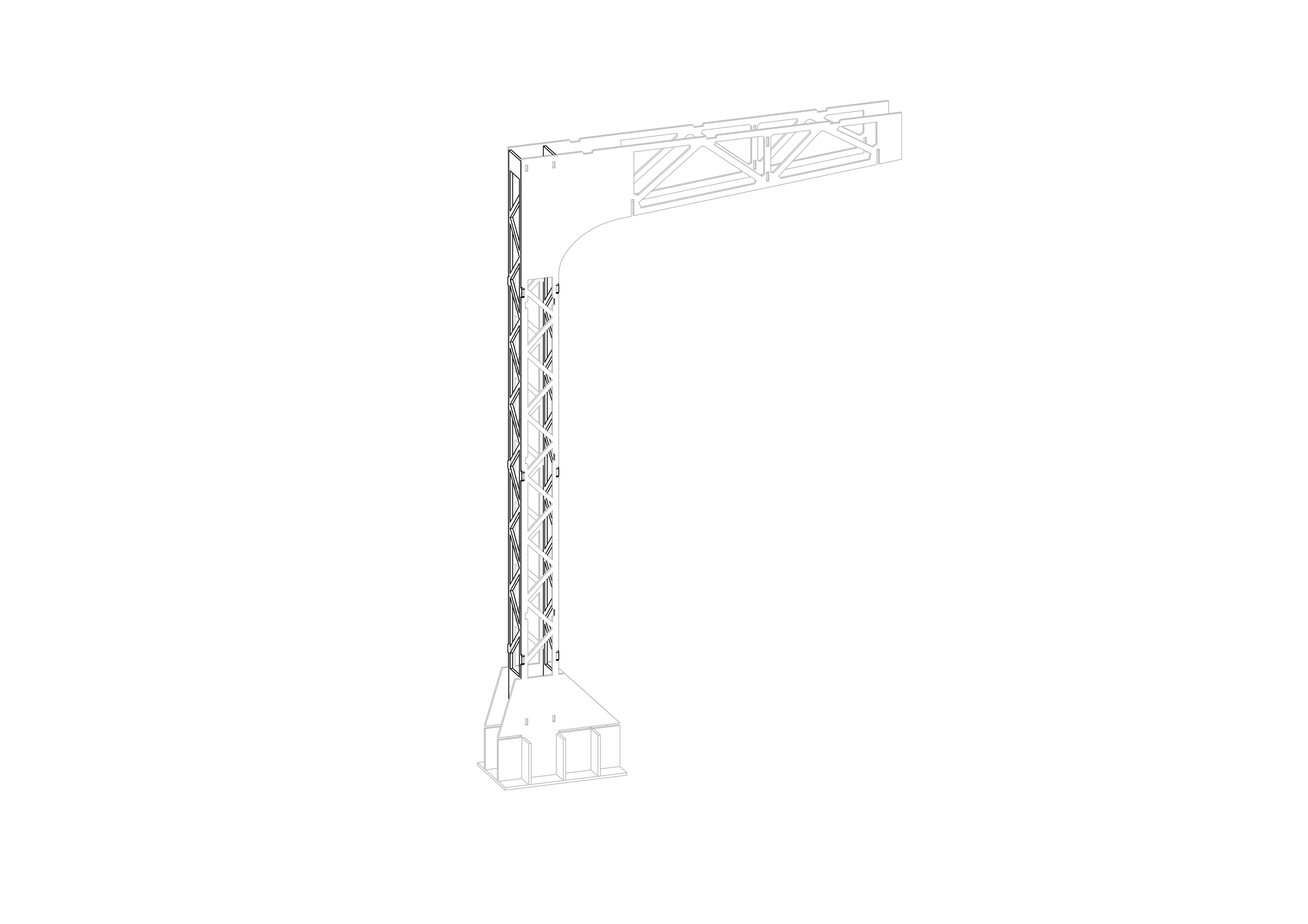
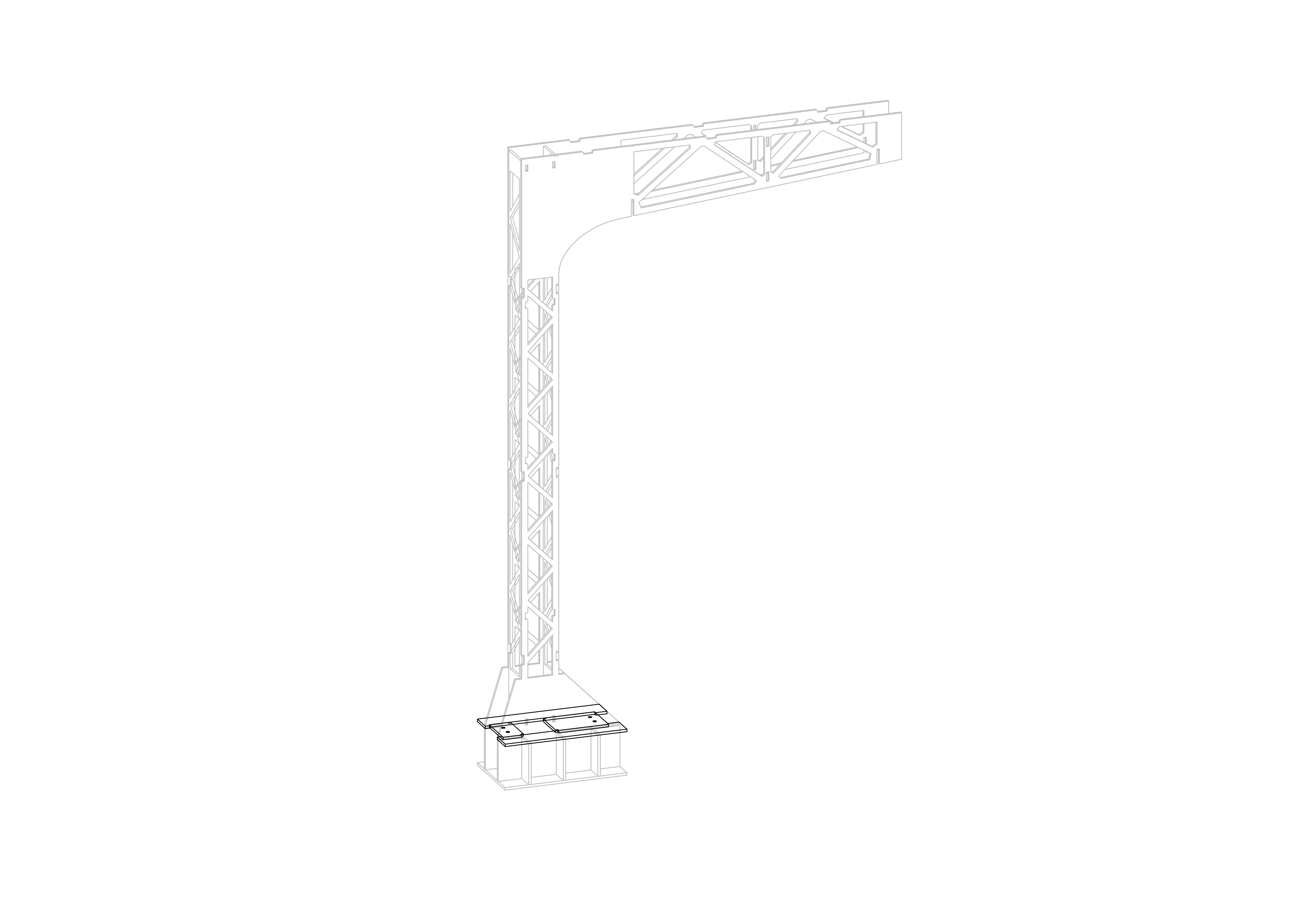
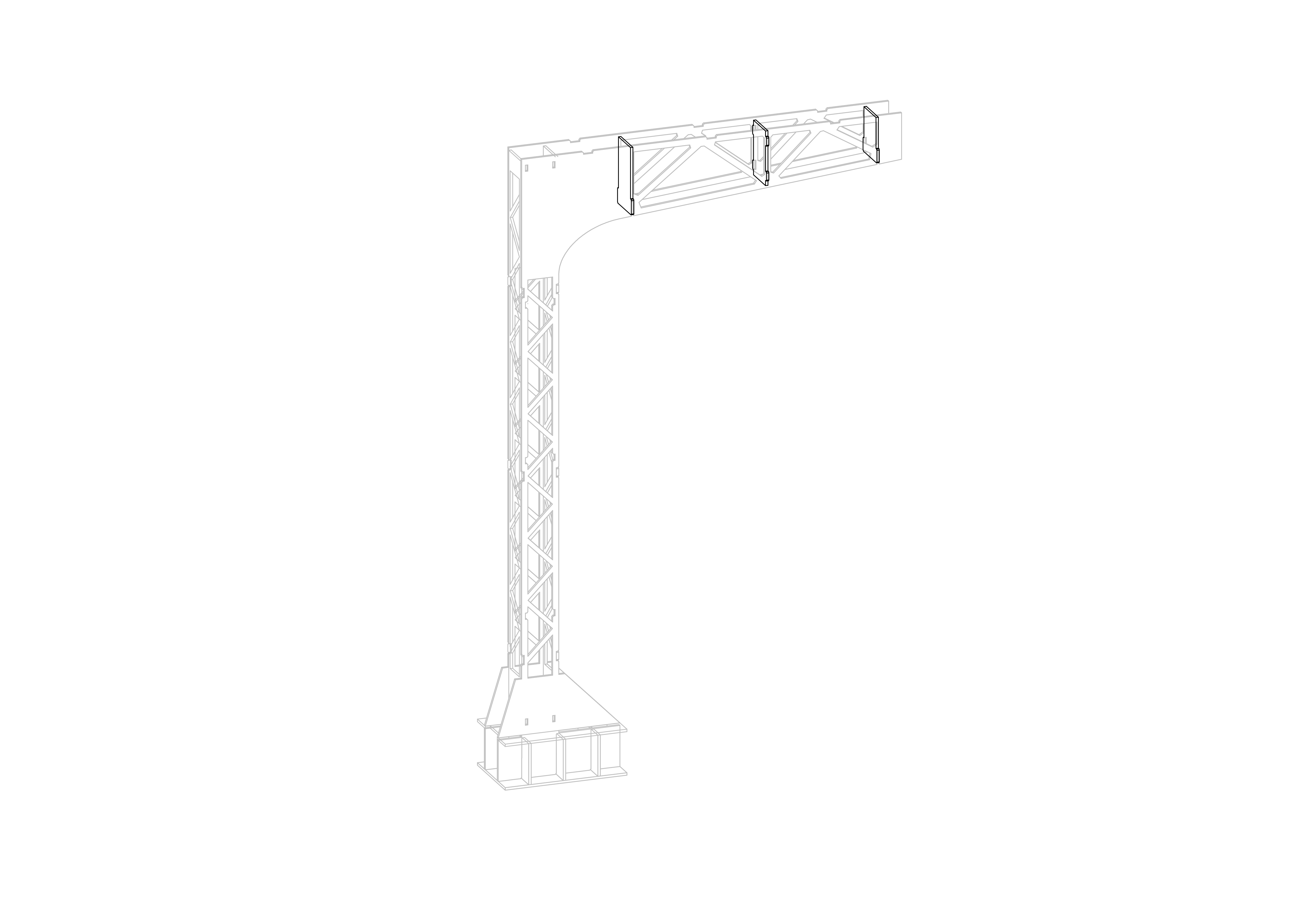
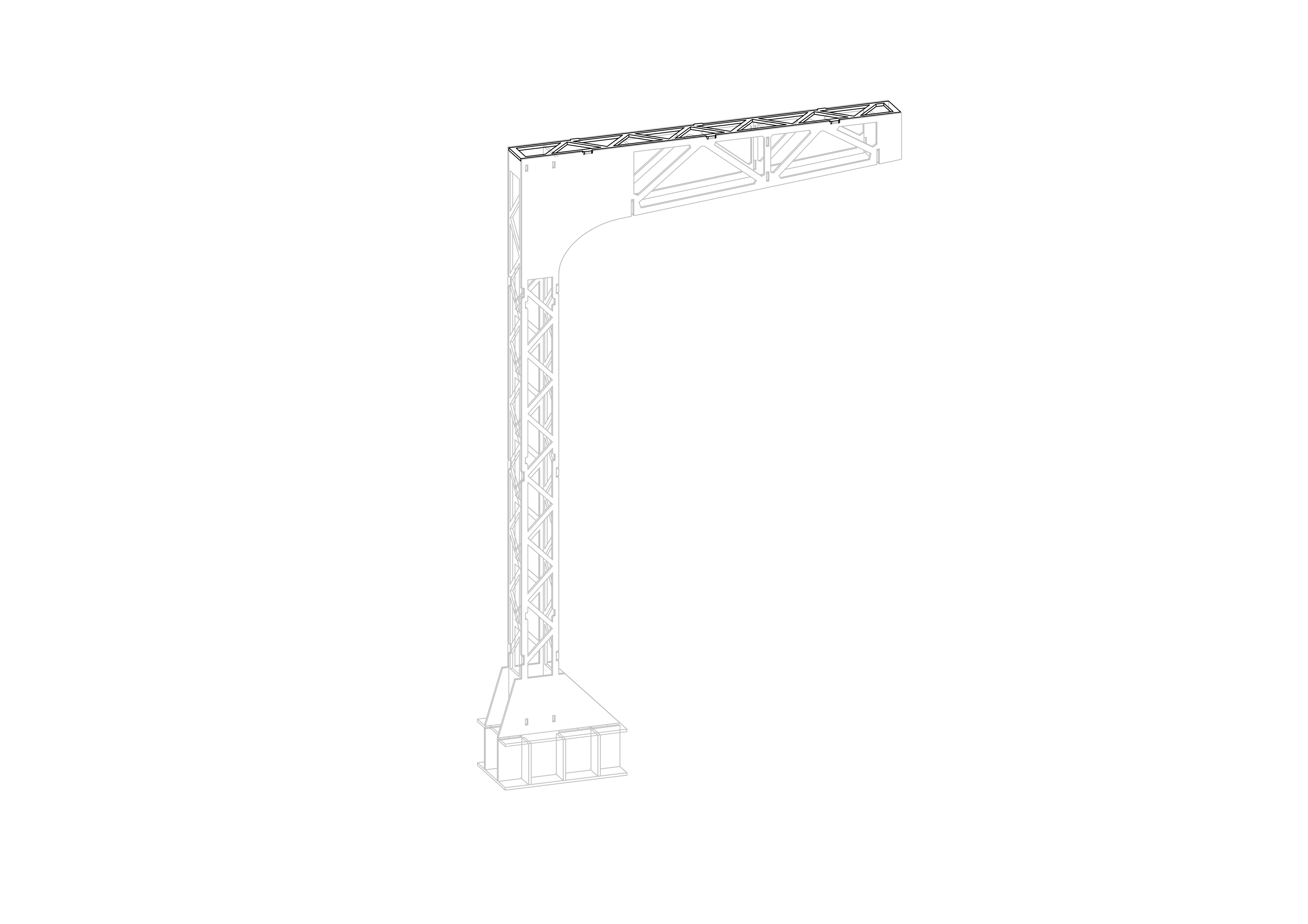
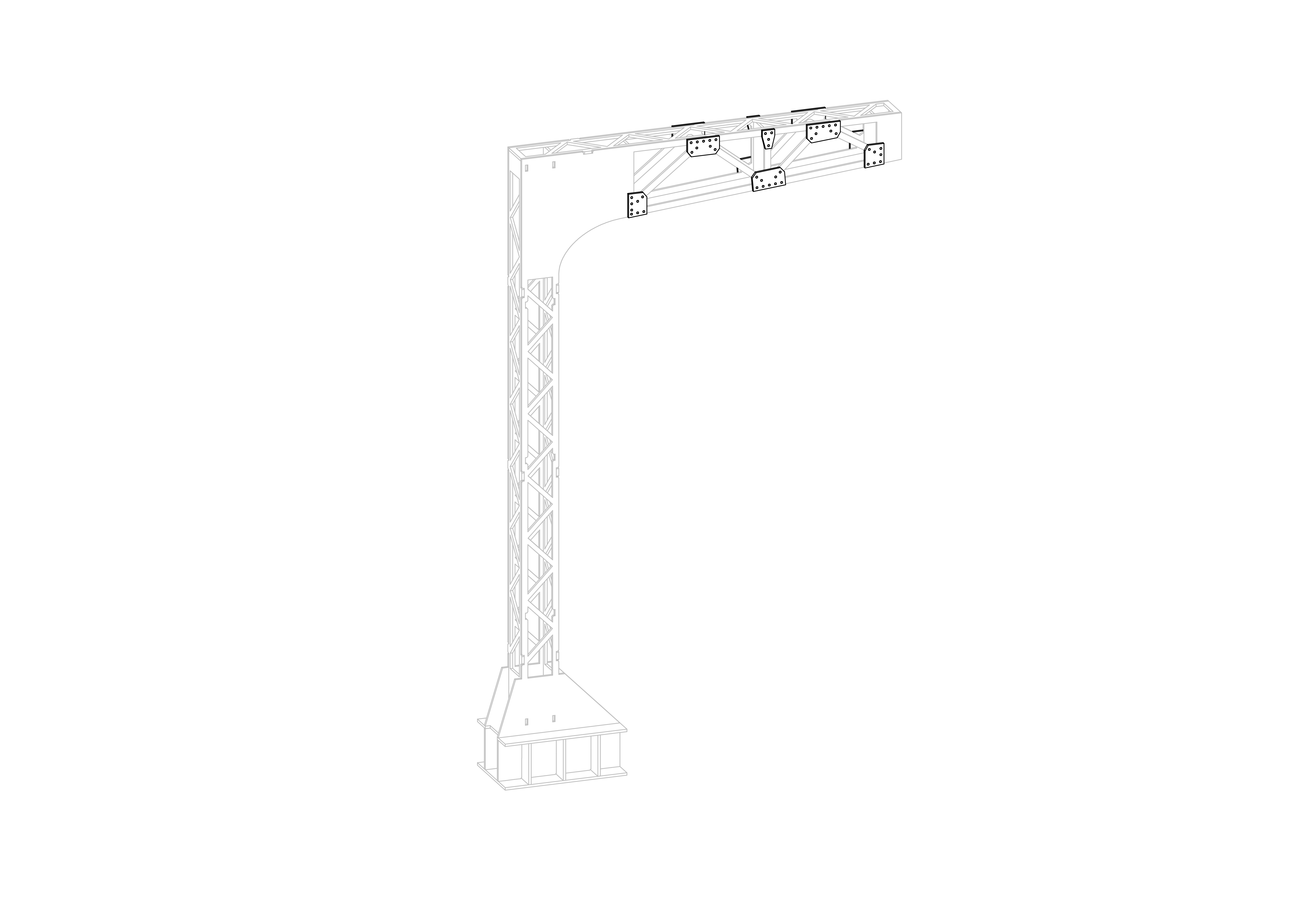
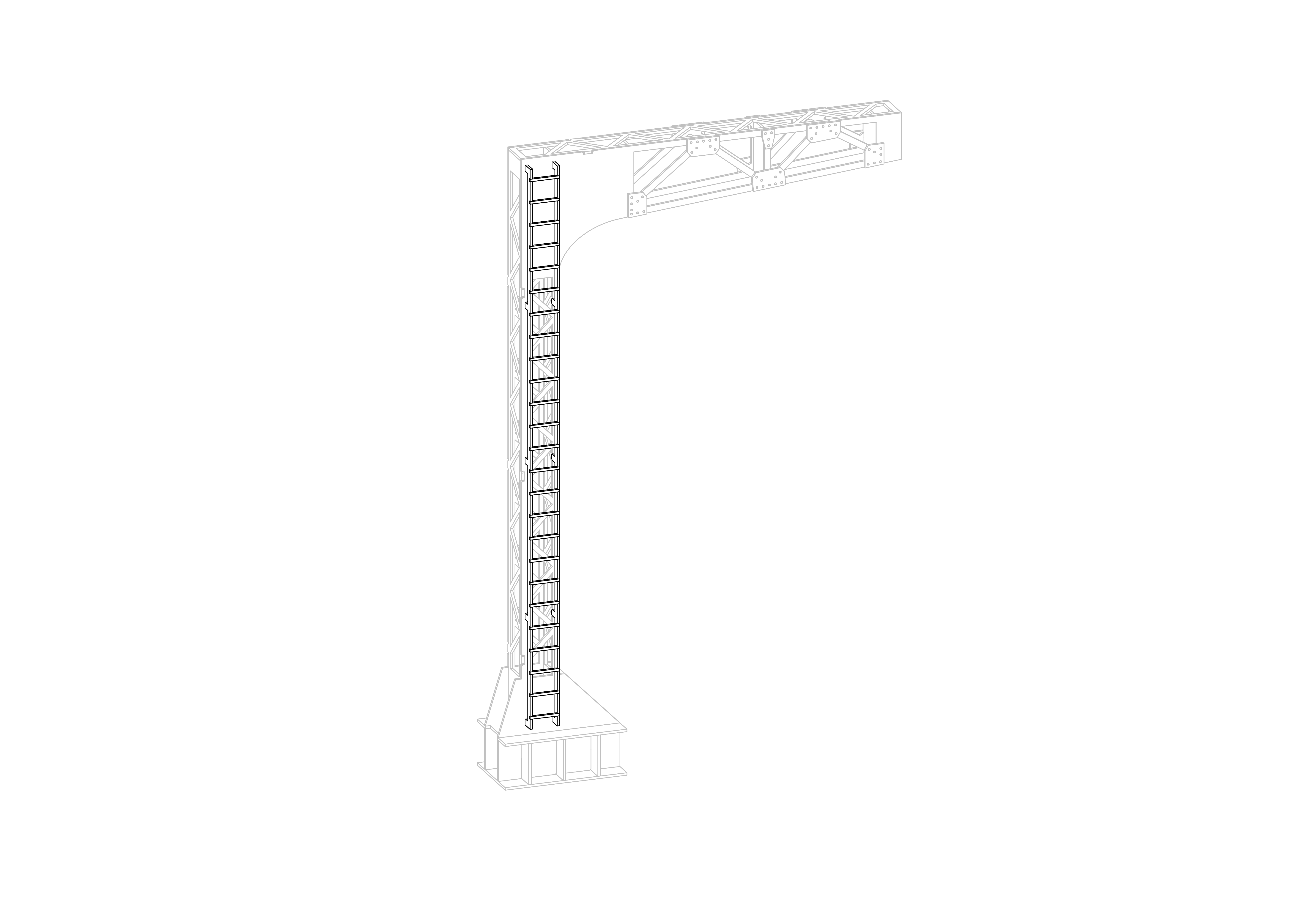
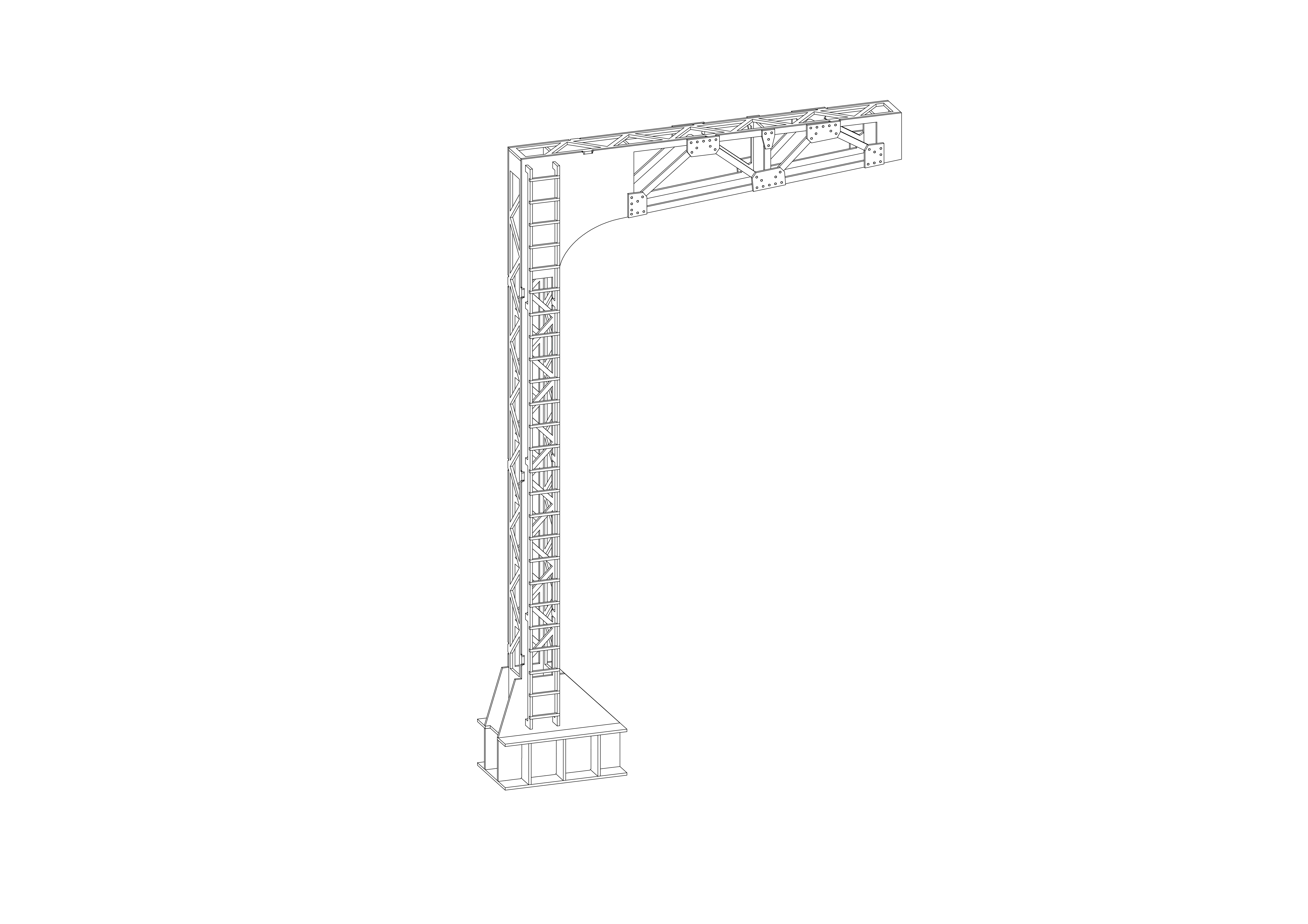
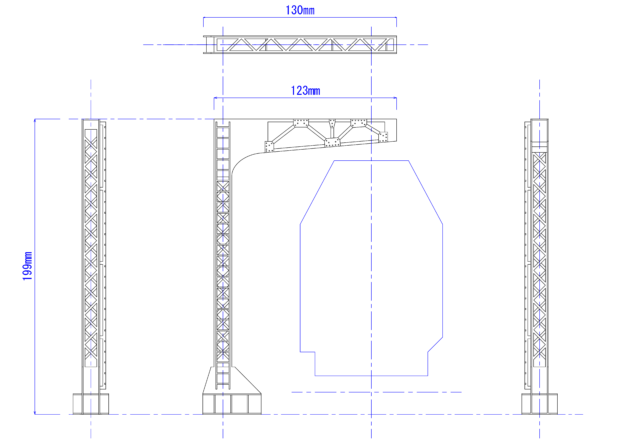
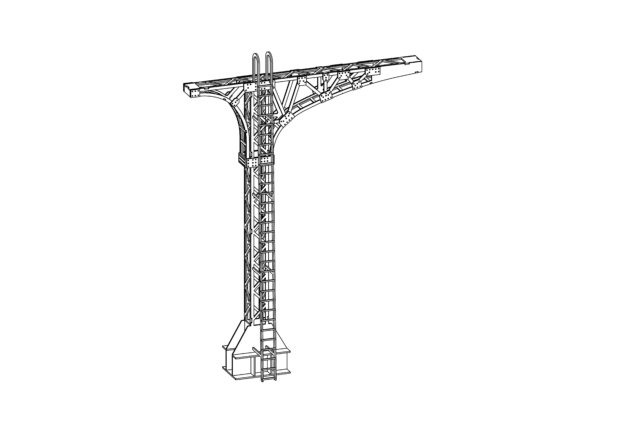
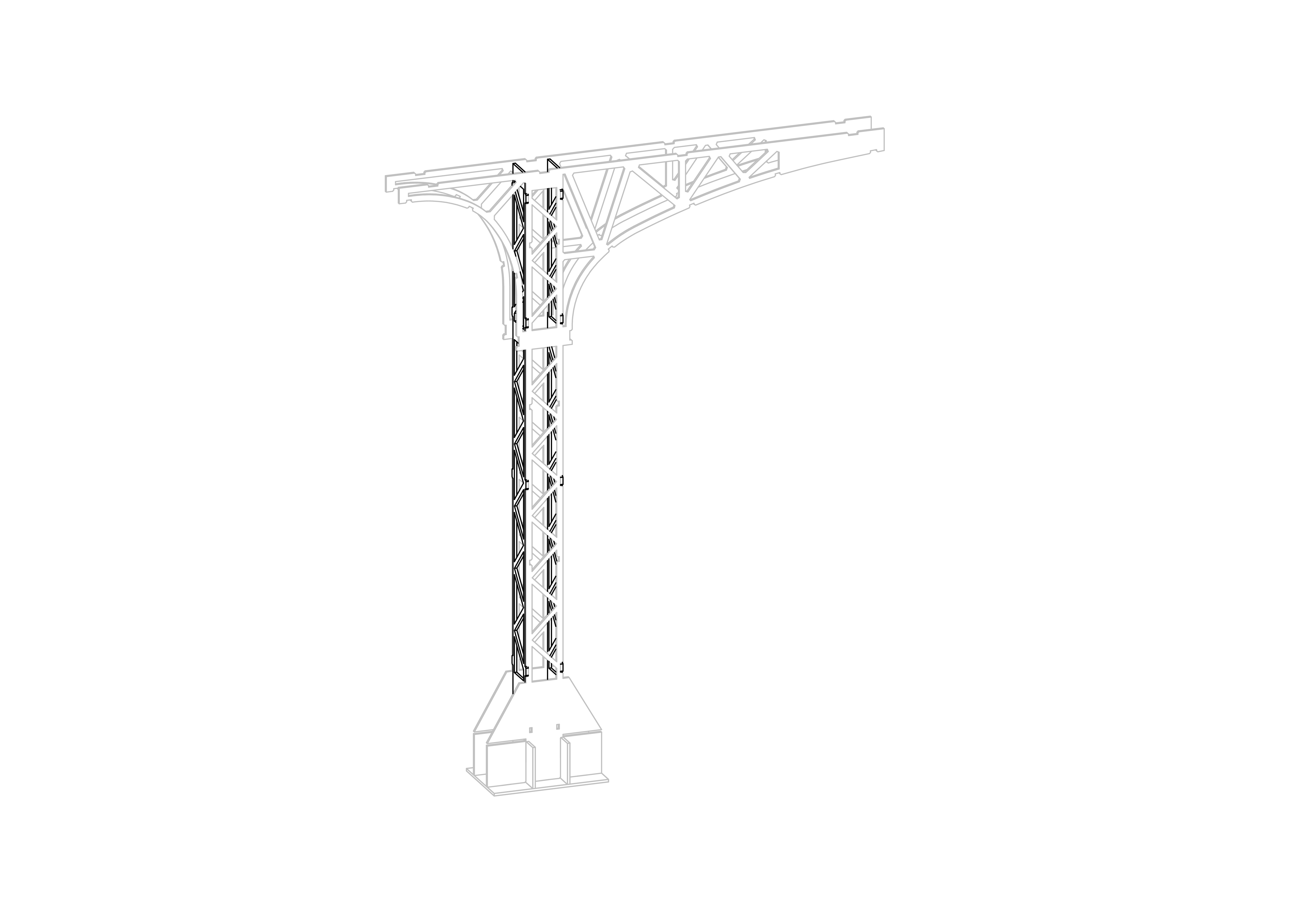
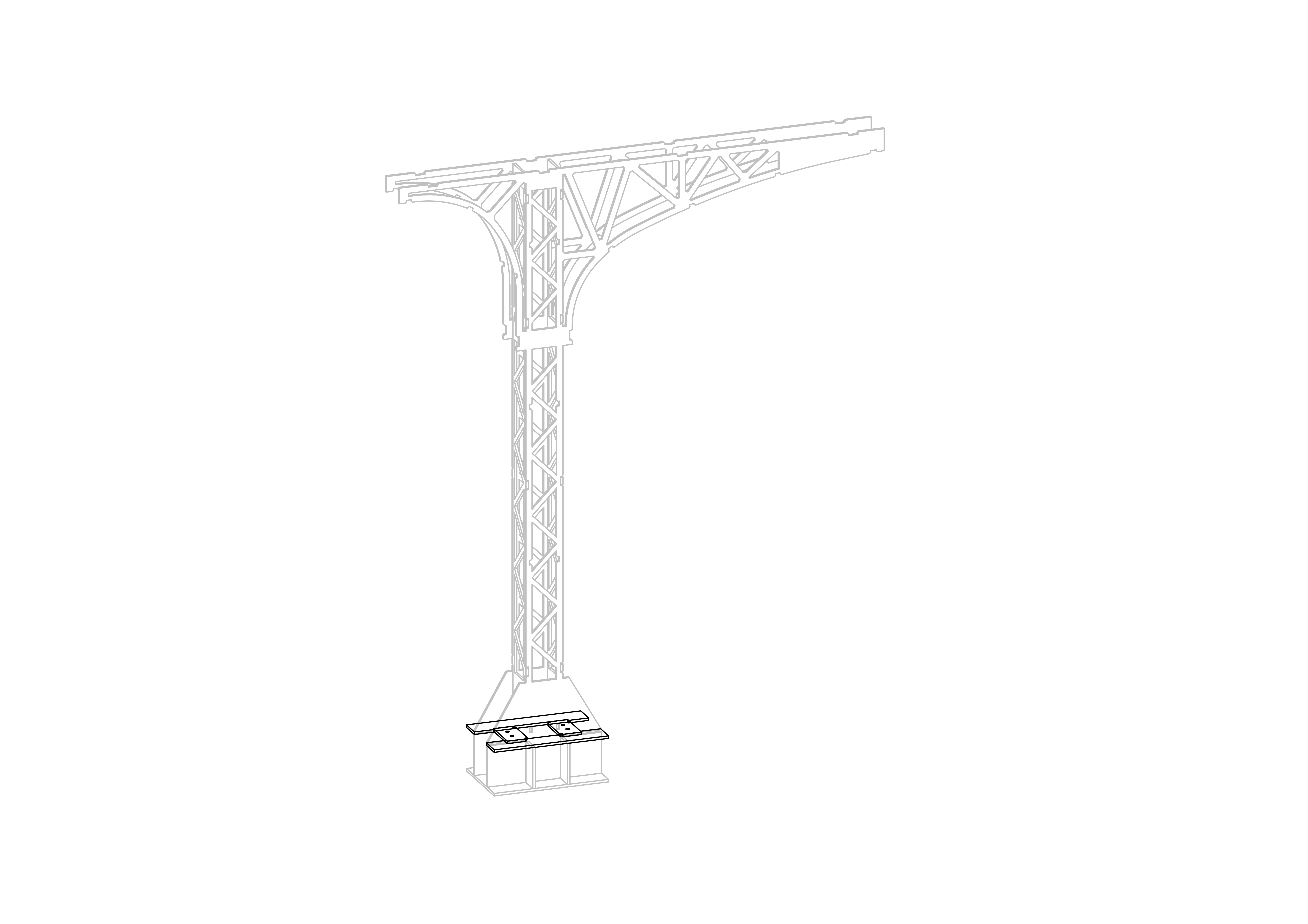
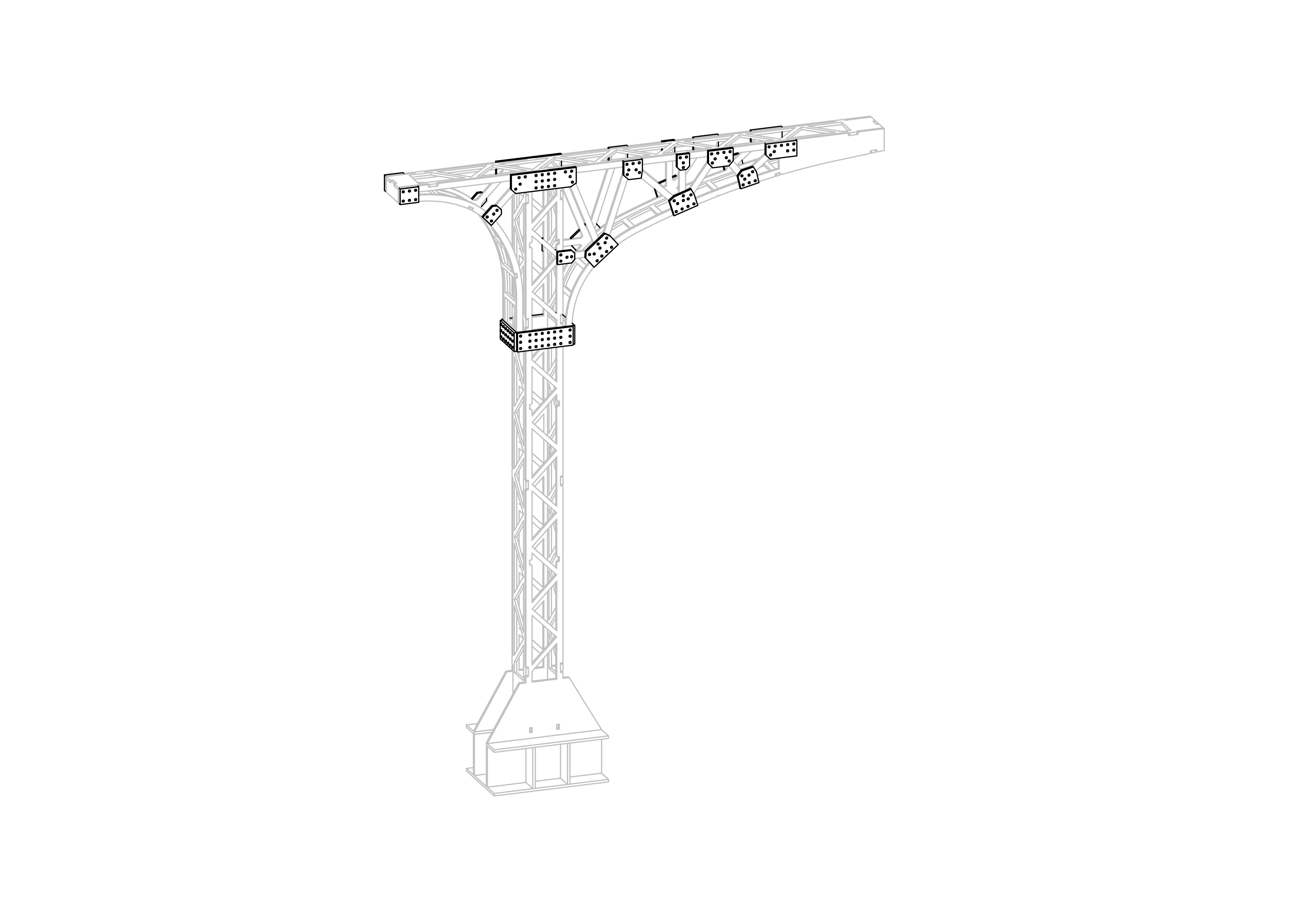
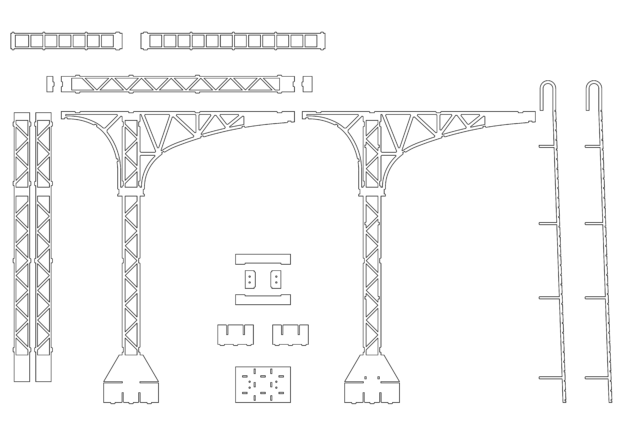
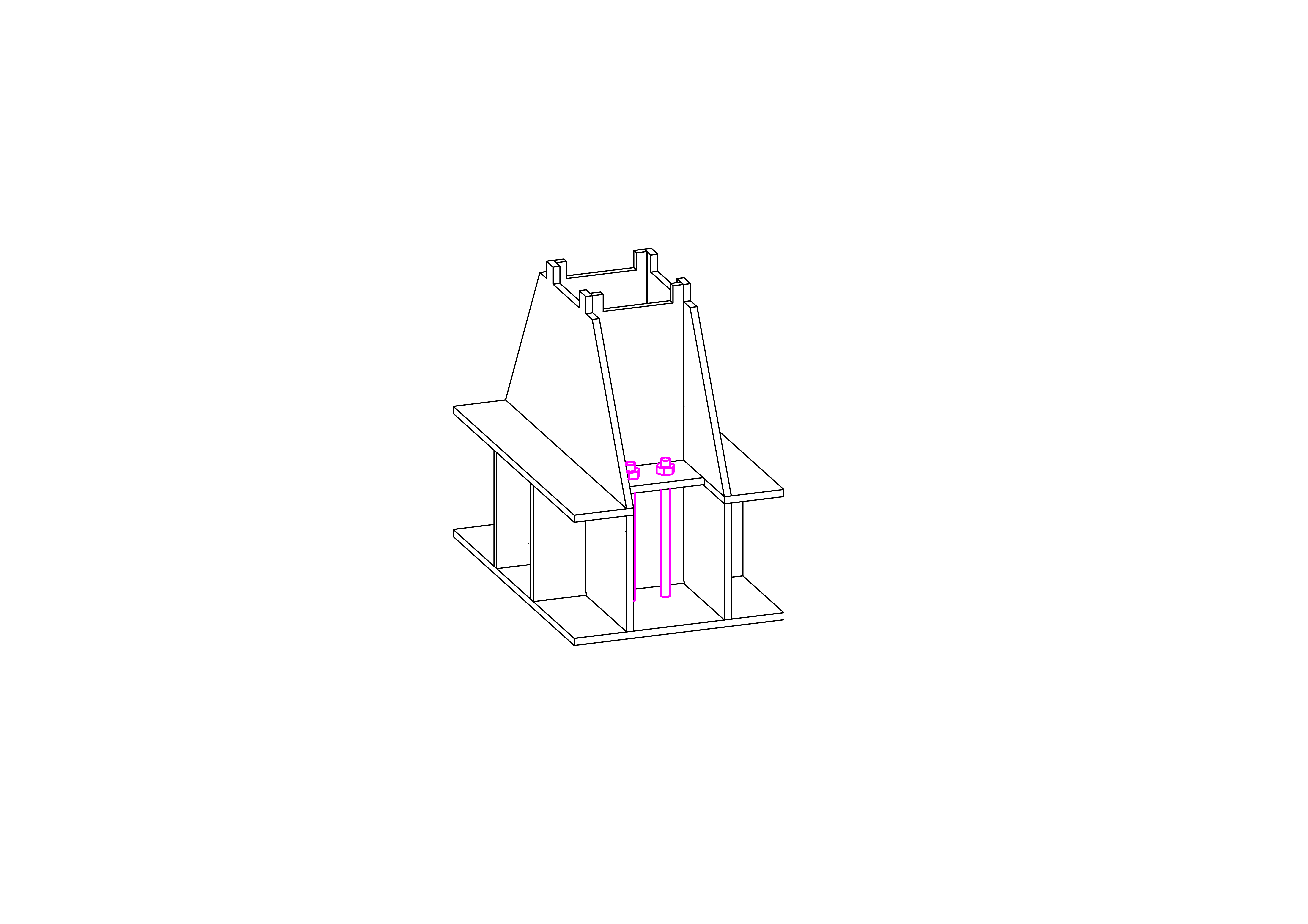
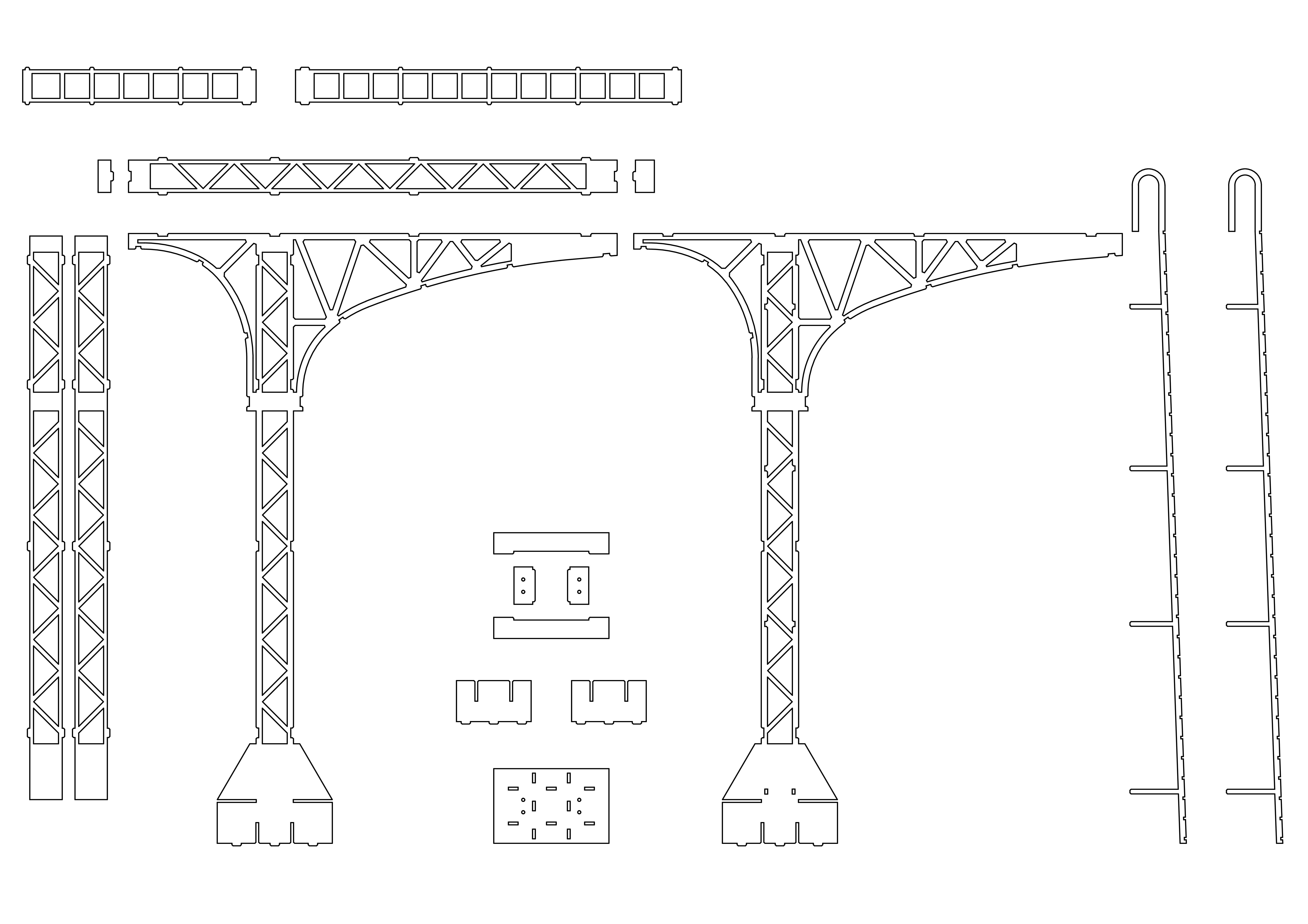
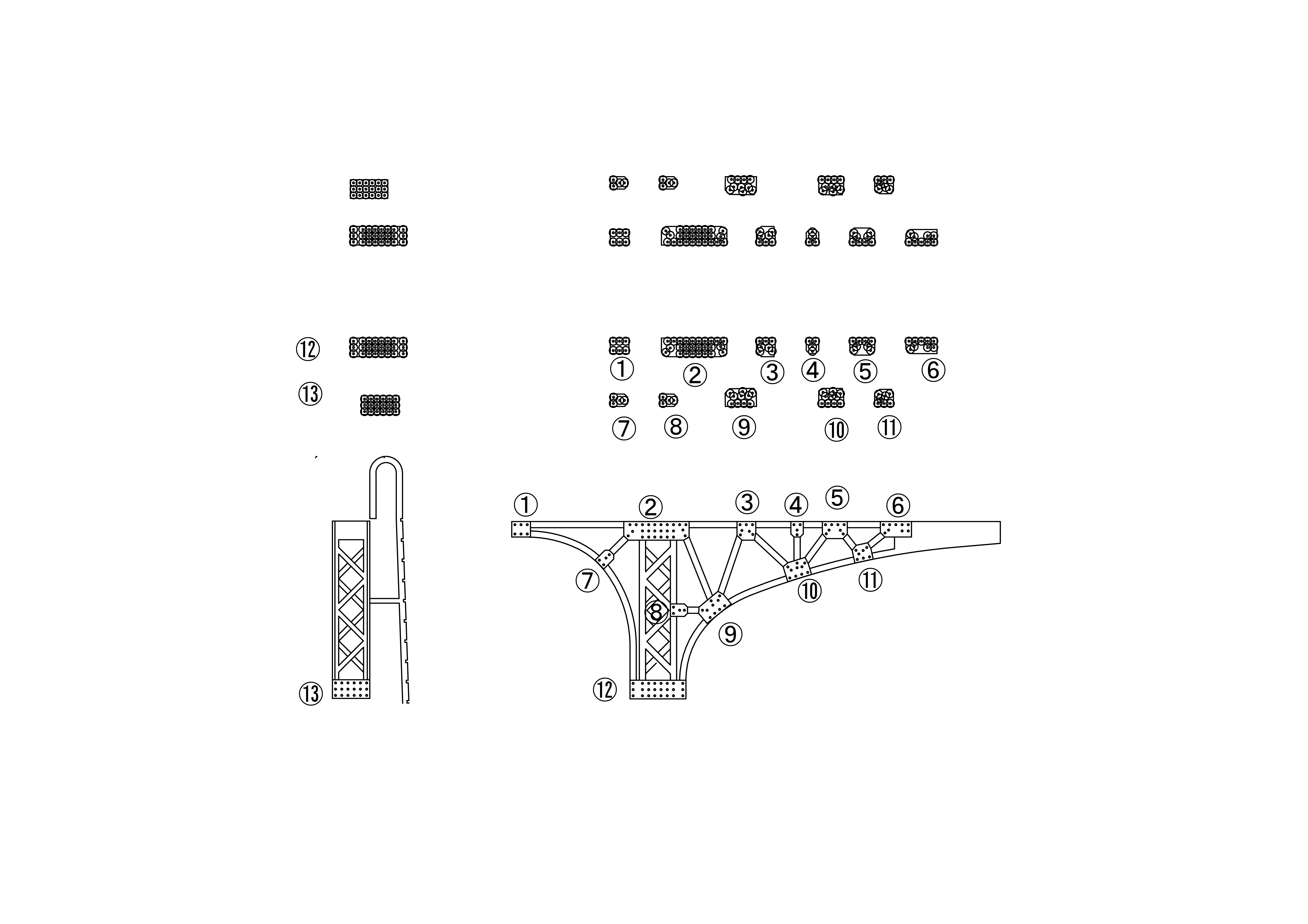
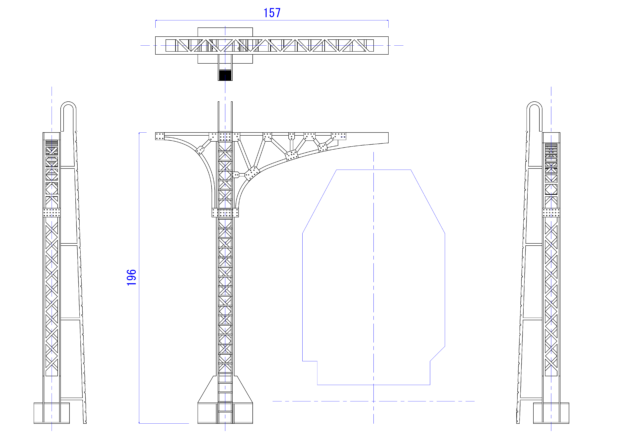
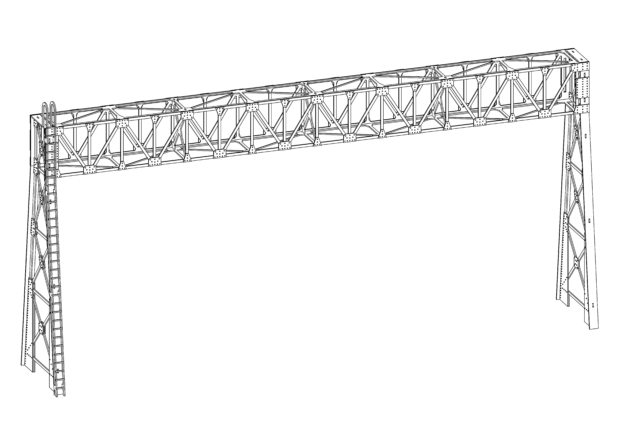
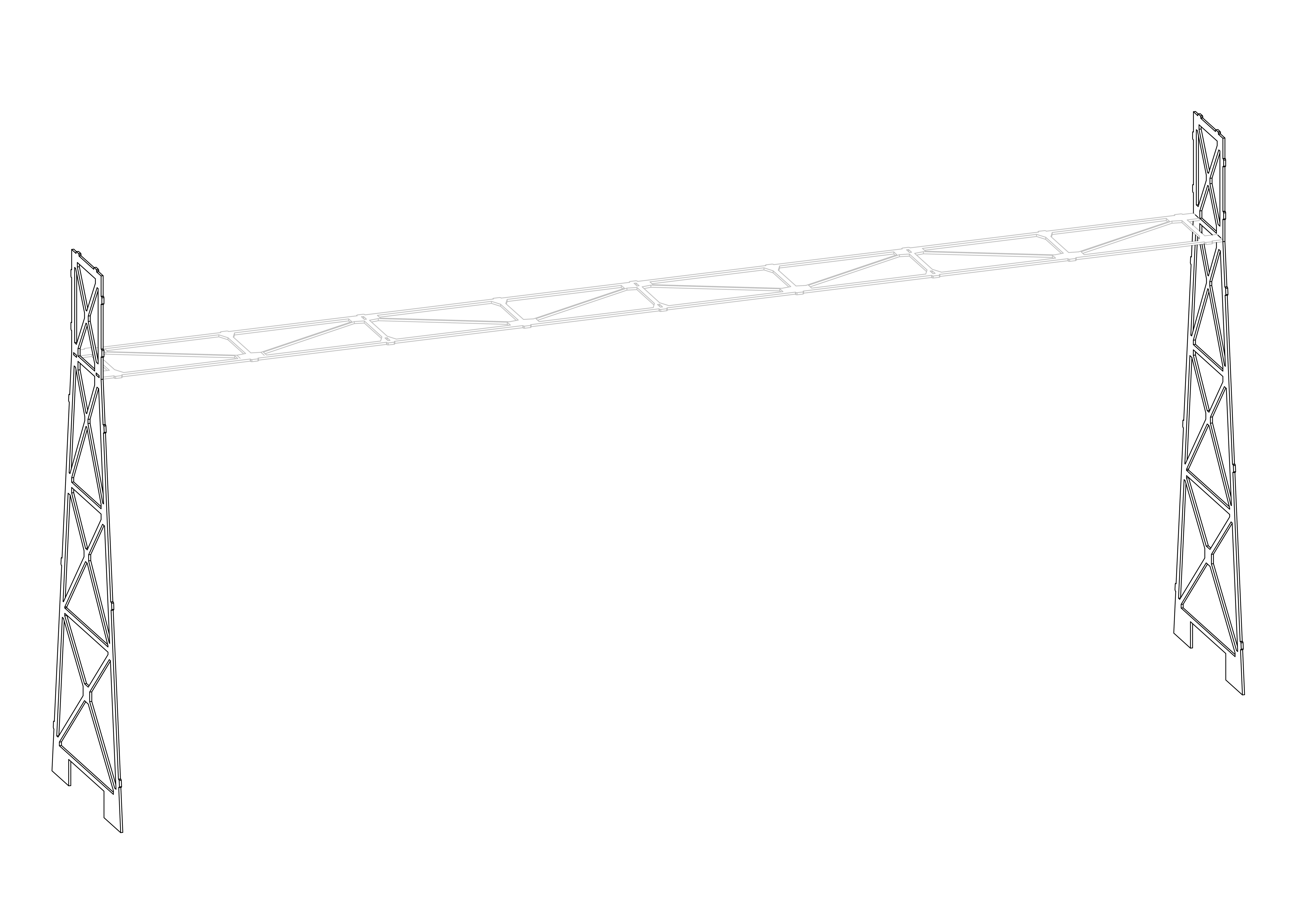
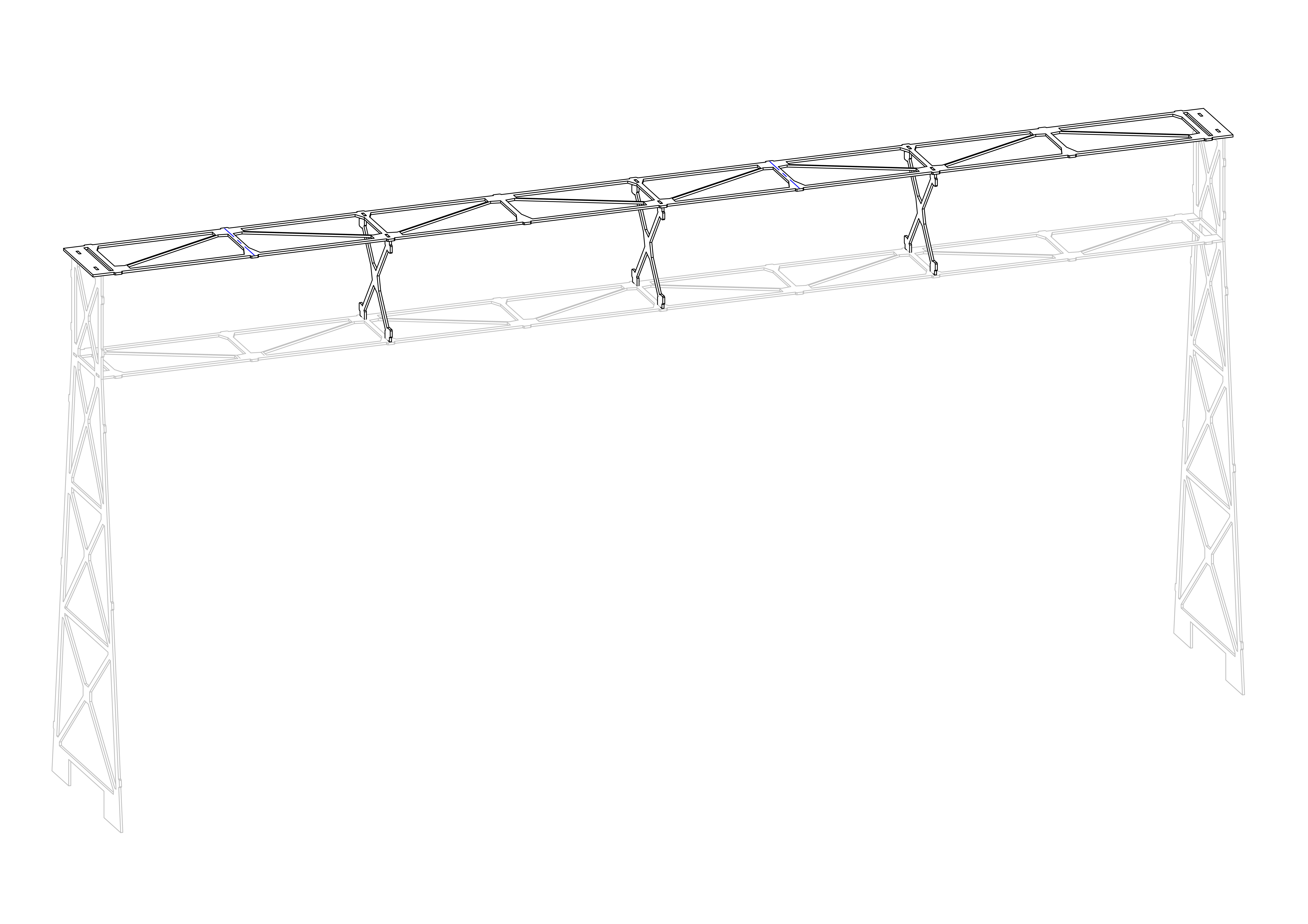
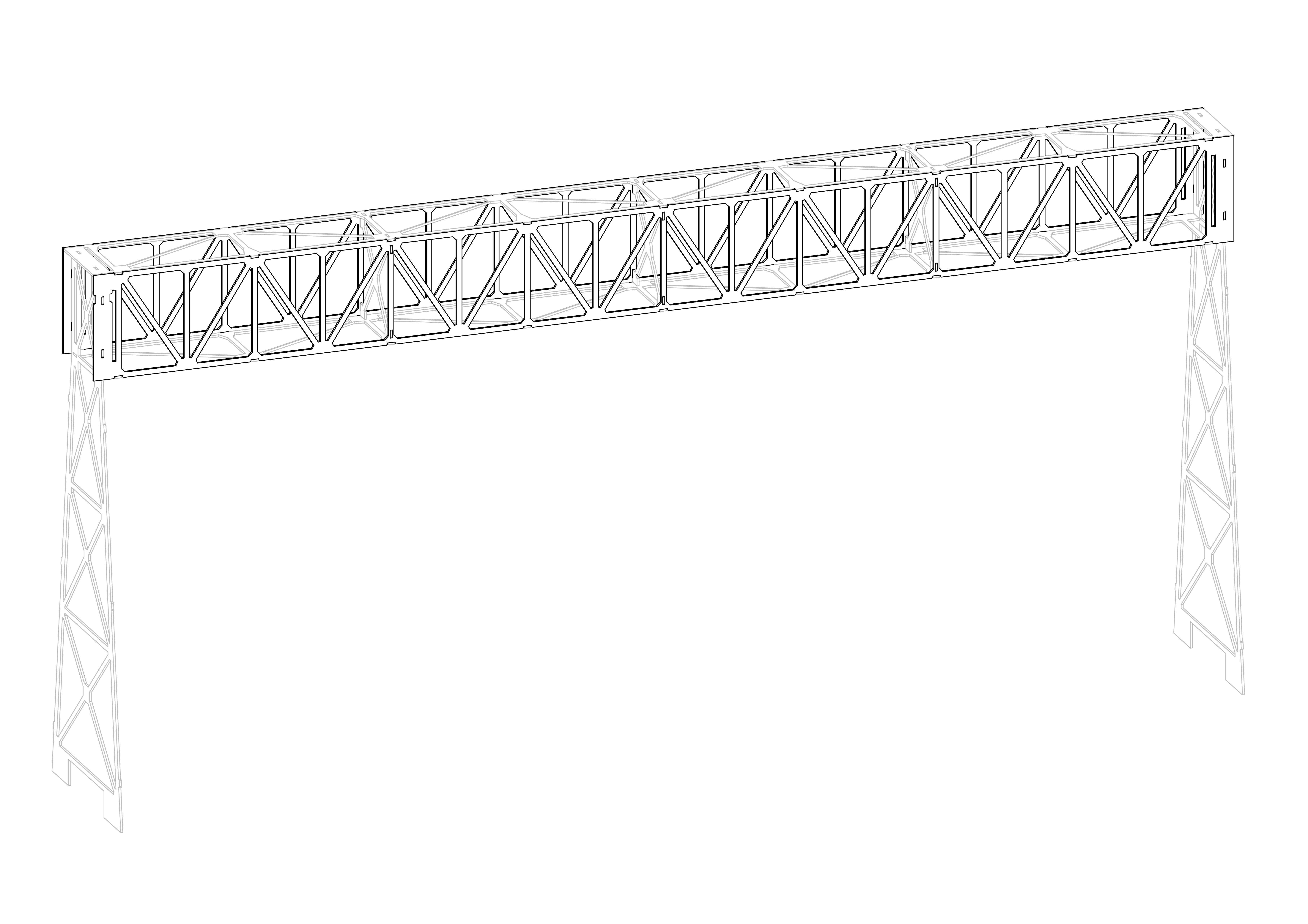
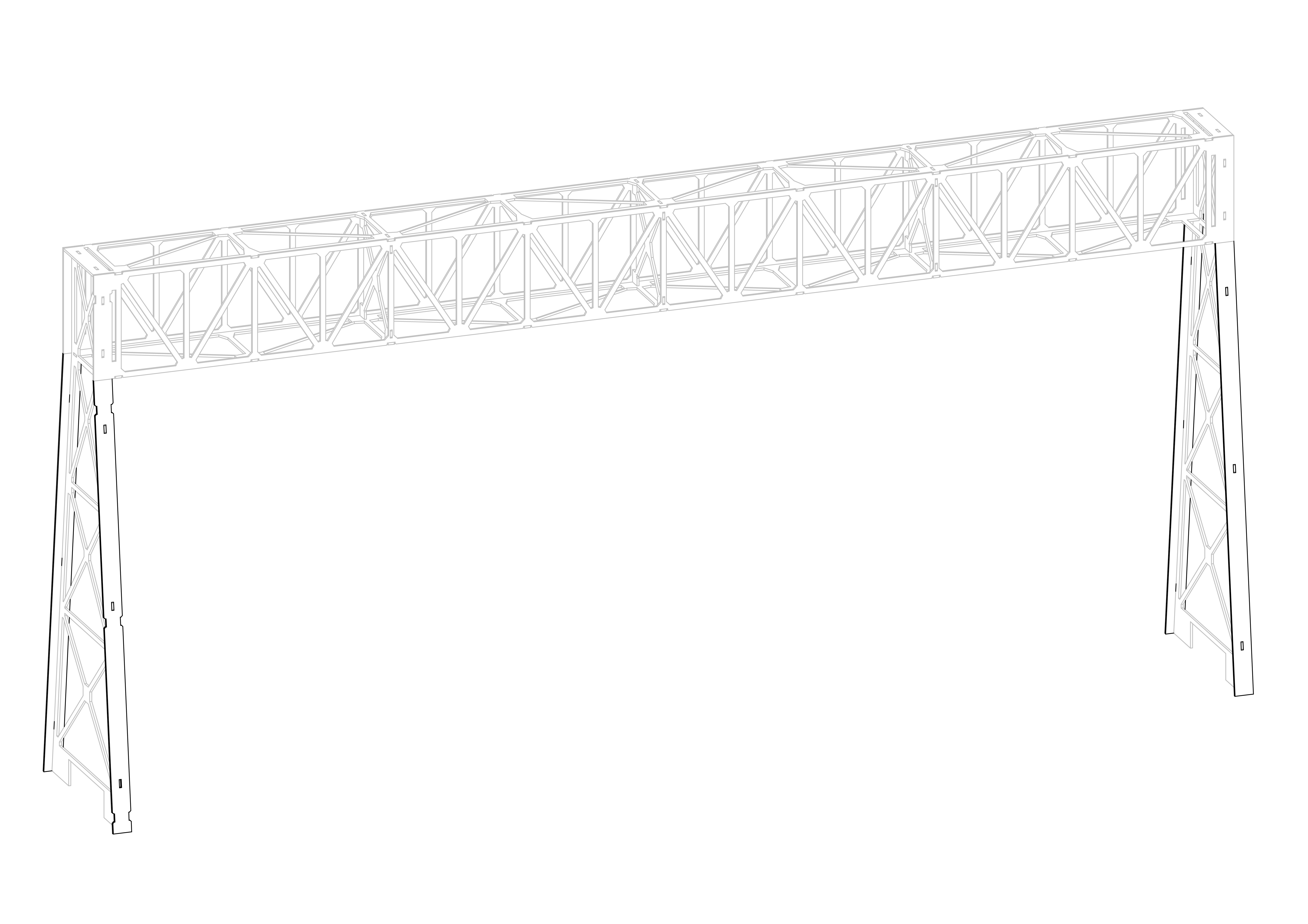
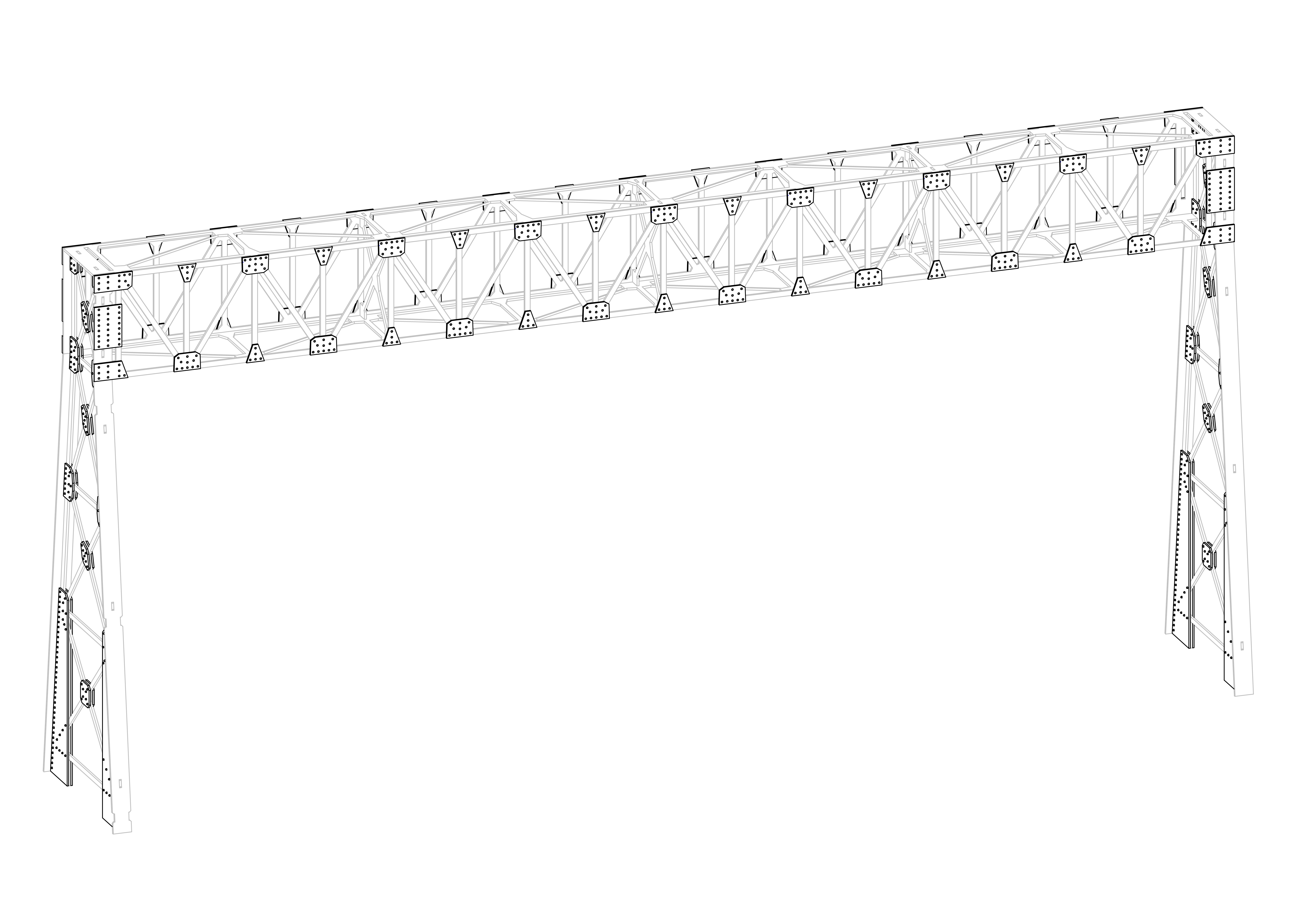
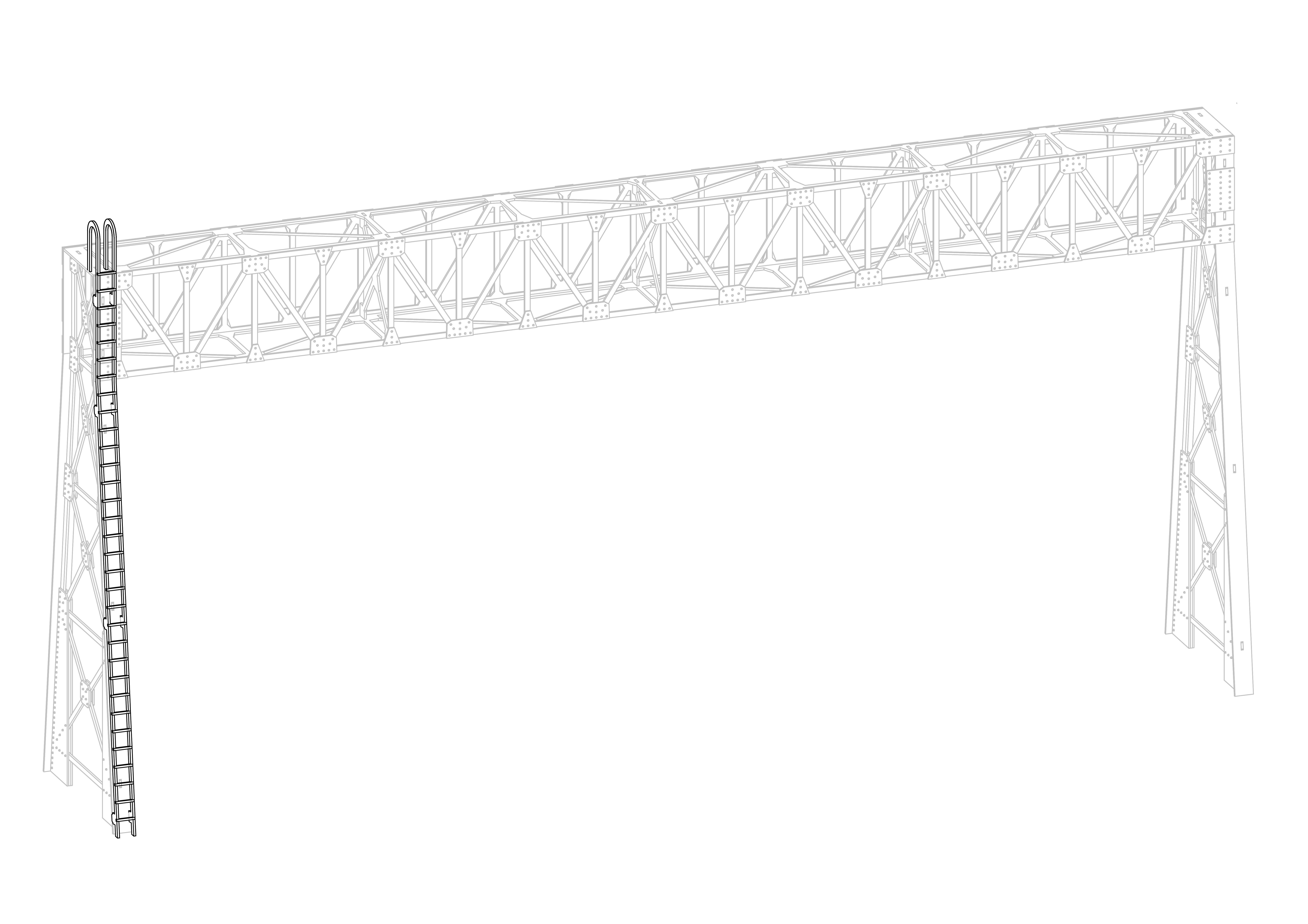
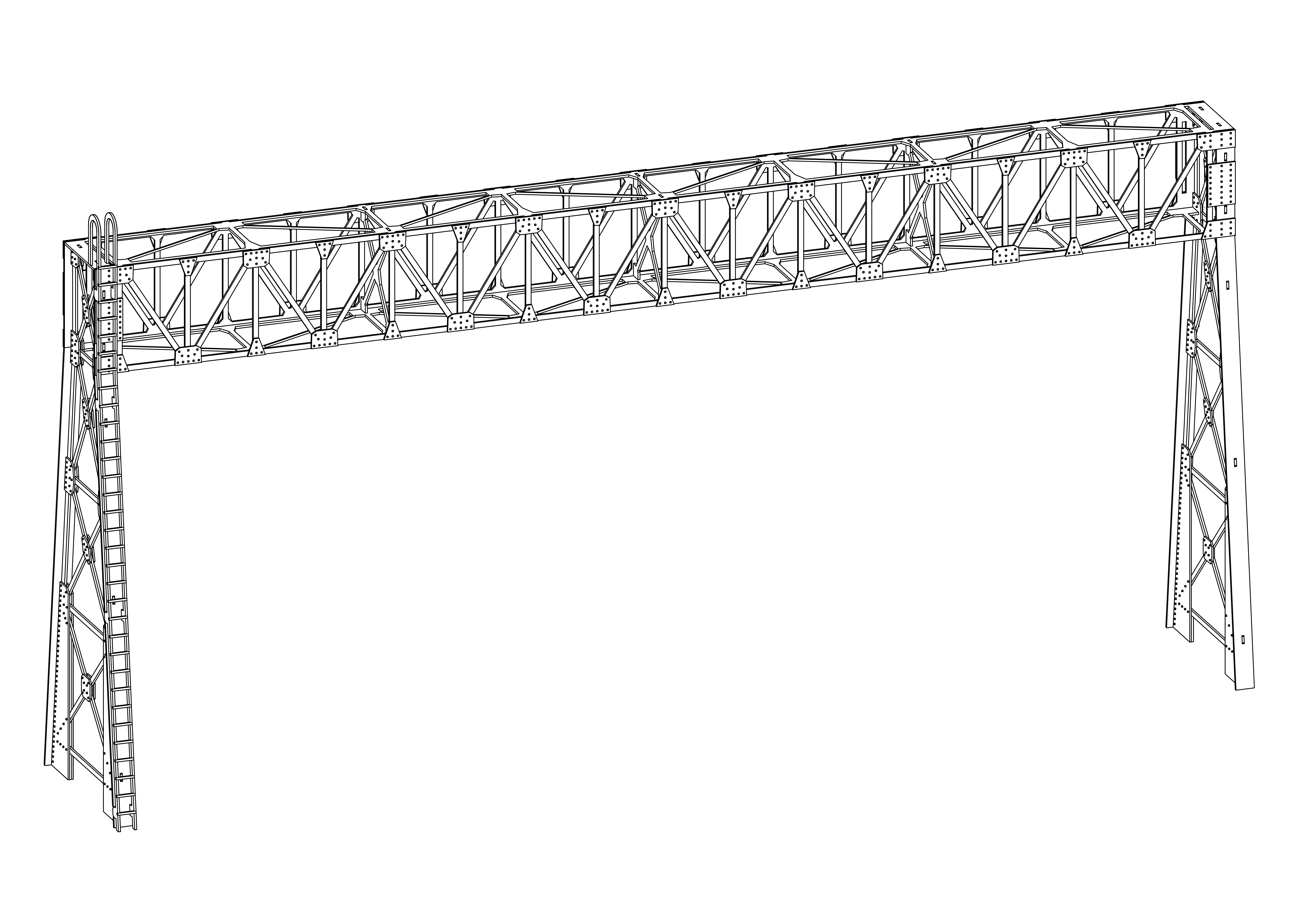
C&O風のCantilever Signal Bridgeをどう組み立て行くか、の構成を示します。これまでに紹介した2つと大きくは変わりません。いつものように、この順番で組み立ててゆくということを意図しているわけでもありません。また、今回は設計したのみで、実際に組み立てた訳ではないので、想定外のことが起き、この通り行かない可能性がゼロではないことも念のためお伝えしておきます。
さて、これまでに、Santa Fe風のcantilever signal bridgeとUP風のcantilever signal bridgeとをご紹介いたしました。この2タイプで、博物館レイアウトに必要な数は揃ったのですが、もう一種、C&Oのプロタイプを参考にして設計だけ完了しているものがあります。