長々と多くの式を並べてきましたが、ユニバーサルジョイントの基準点の角度や角速度がどの程度異なってくるのかを、いくつかの数字を入れてグラフで見てみたいと思います。
ここでは、ジョイントを2度から14度まで2度ずつ変化させて見ます。2つのジョイントをつないだ場合は、\(|\alpha|=|\beta|\)とします。
2度から14度というのには明確な根拠はないのですが、16番でEF級電気をモーター一つでユニバーサルジョイントで台車に動力を伝達した場合には、これくらいの角度になるだろうということをラフな作図で得た結果です。カーブの半径は600mmを想定しています。この作図をしながらいろいろと思ったことがありますので、頭の中が整理できたら、別の稿を起こしたいと思っています。
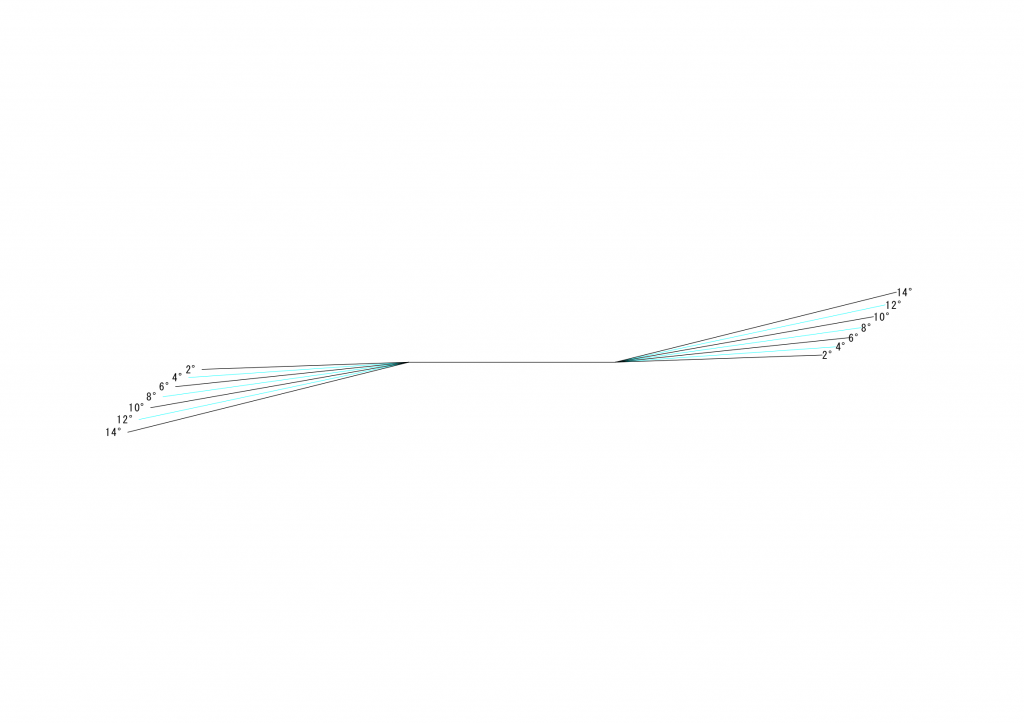
2°から14°というのがどれくらいの角度かを直感的に理解できるように下の図を用意しました。ここでは、水平線に対する傾いた線の角度で表示していますが、これは駆動面と伝達面とがなす角度、中継面と最終伝達面とがなす角度と同じとなることはそれぞれの線に垂直な線を引けばわかると思います。
(1)ユニバーサルジョイントを1つのみ使った時の駆動面の基準点の角度\(\theta\)と伝達面との基準点の角度\(\varphi\)との関係は下の式で表されます。
\(\varphi = tan^{-1}(tan(\theta-\frac{\pi}{2})\cdot\frac{1}{cos(\alpha)})\)
\(\theta\)を\(x\)軸にとったときに、\(\varphi-(\theta-\frac{\pi}{2})\)を\(y\)軸にとったときのグラフが下の図となります。\(\alpha\)を10°程度とした時に、この差が0.5°くらいとなります。
(2)ユニバーサルジョイントを2つ組み合わせ、伝達面と中継面との位相を90度ずらした時の駆動面の基準点の角度\(\theta\)と最終伝達面との基準点の角度\(\xi\)の関係は下の式で表されます。
\(\xi=tan^{-1}(tan(\theta-\frac{\pi}{2})\cdot\frac{1}{cos^2(\alpha)})\)
\(\theta\)を\(x\)軸にとったときに、\(\xi-(\theta-\frac{\pi}{2})\)を\(y\)軸にとったときのグラフが下の図となります。ユニバーサルジョイント1ケの時に比べ、角度の差が大きくなっていることがわかります。
(3)ユニバーサルジョイントを1つ使った時の駆動面と伝達面との基準点の角速度の比は下の式で表されます。
\(\frac{cos(\alpha)}{cos^2(\omega t) + sin^2(\omega t)\cdot cos^2(\alpha)}\)
これをグラフにしたのが下図です。
(4)ユニバーサルジョイントを2つ組み合わせ、伝達面と中継面との位相を90度ずらした時の駆動面と最終伝達面との基準点の角速度の比は下の式で表されます。
\(\frac{cos^2(\alpha)}{cos^2(\omega t)+sin^2(\omega t)\cdot cos^4(\alpha)}\)
これをグラフにしたのが下図です。
\(\alpha\)を10°とすると、最終駆動面の基準点の角速度は、駆動面の基準点の角速度の±3%程度変動することとなります。
私見では、上記の±3%というのは無視はできないのではなか、とも思いますが、角速度の変動がどの範囲に収まっていれば、回転が滑らかとみなせるか、ということに関しての情報が見つけられず、今回の議論はここまでとしたいと思います。