もともは、「ユニバーサルジョイントを正しく使わないと、動力側と伝達した側とで角速度が異なる」ということからスタートしましたので、ここでは角速度の式を導出してみたいと思います。角速度は、時間によって変化する角度を時間で微分すれば得ることができます。これも高校1年生で学習する範囲かと思います。
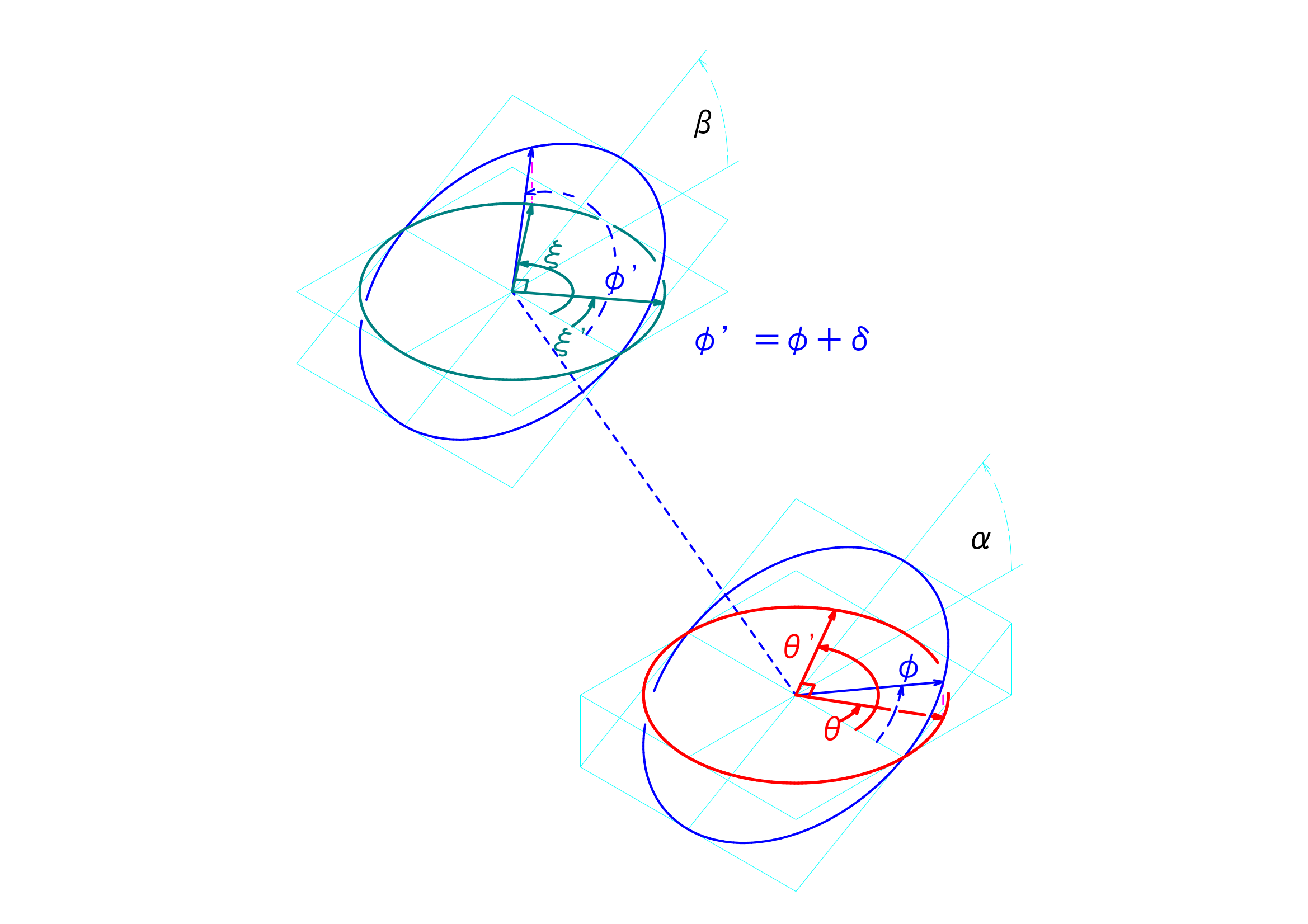
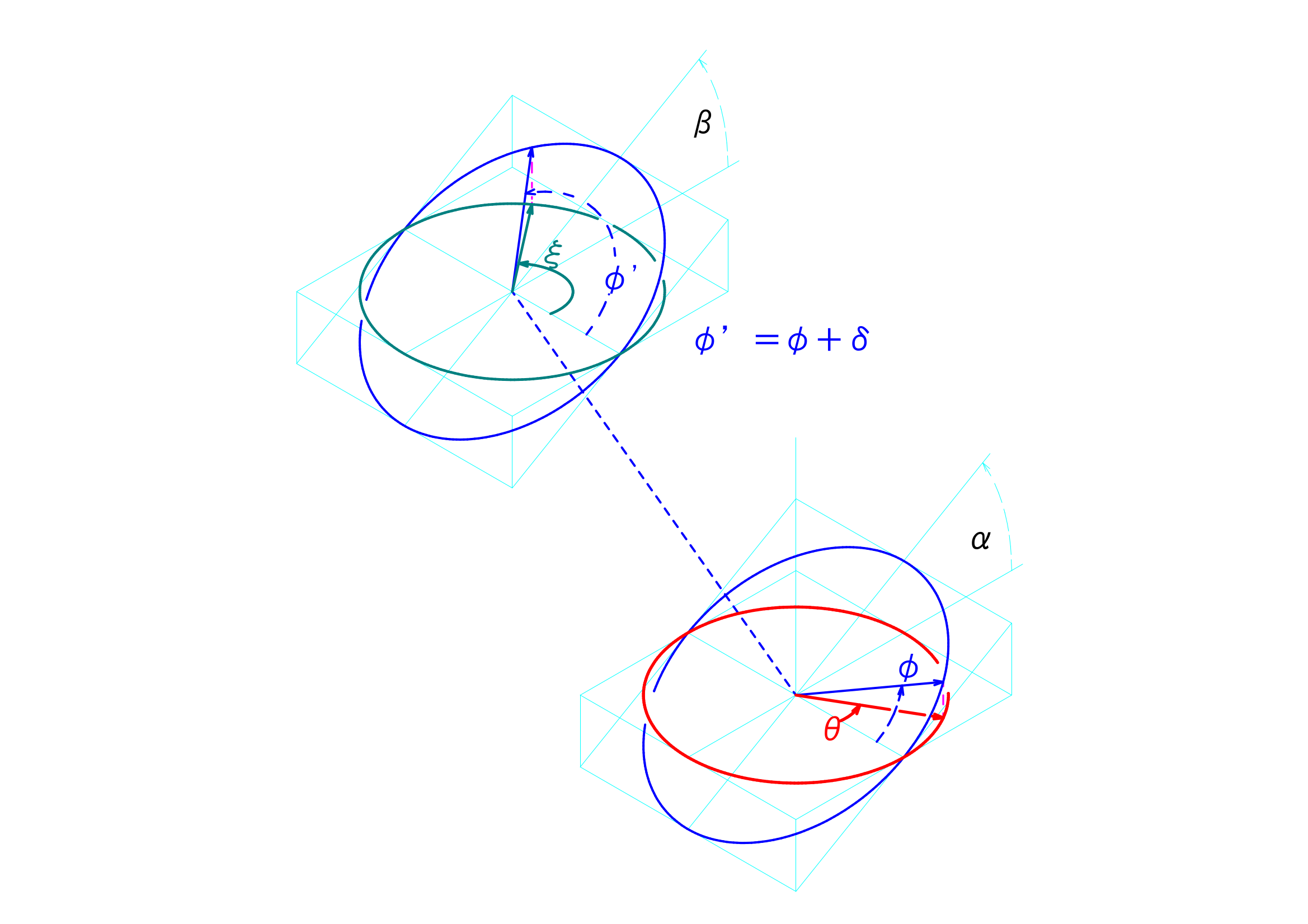
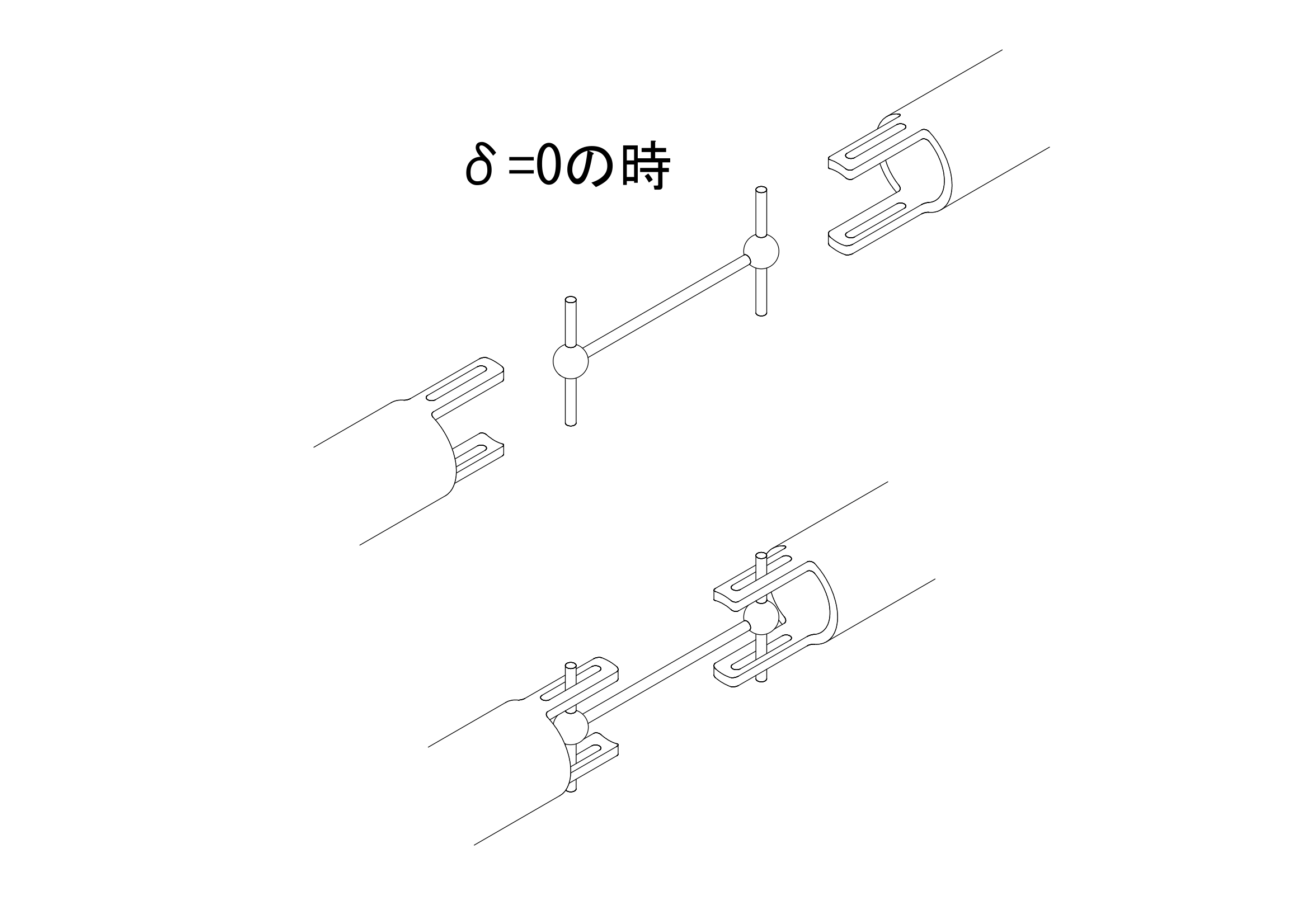
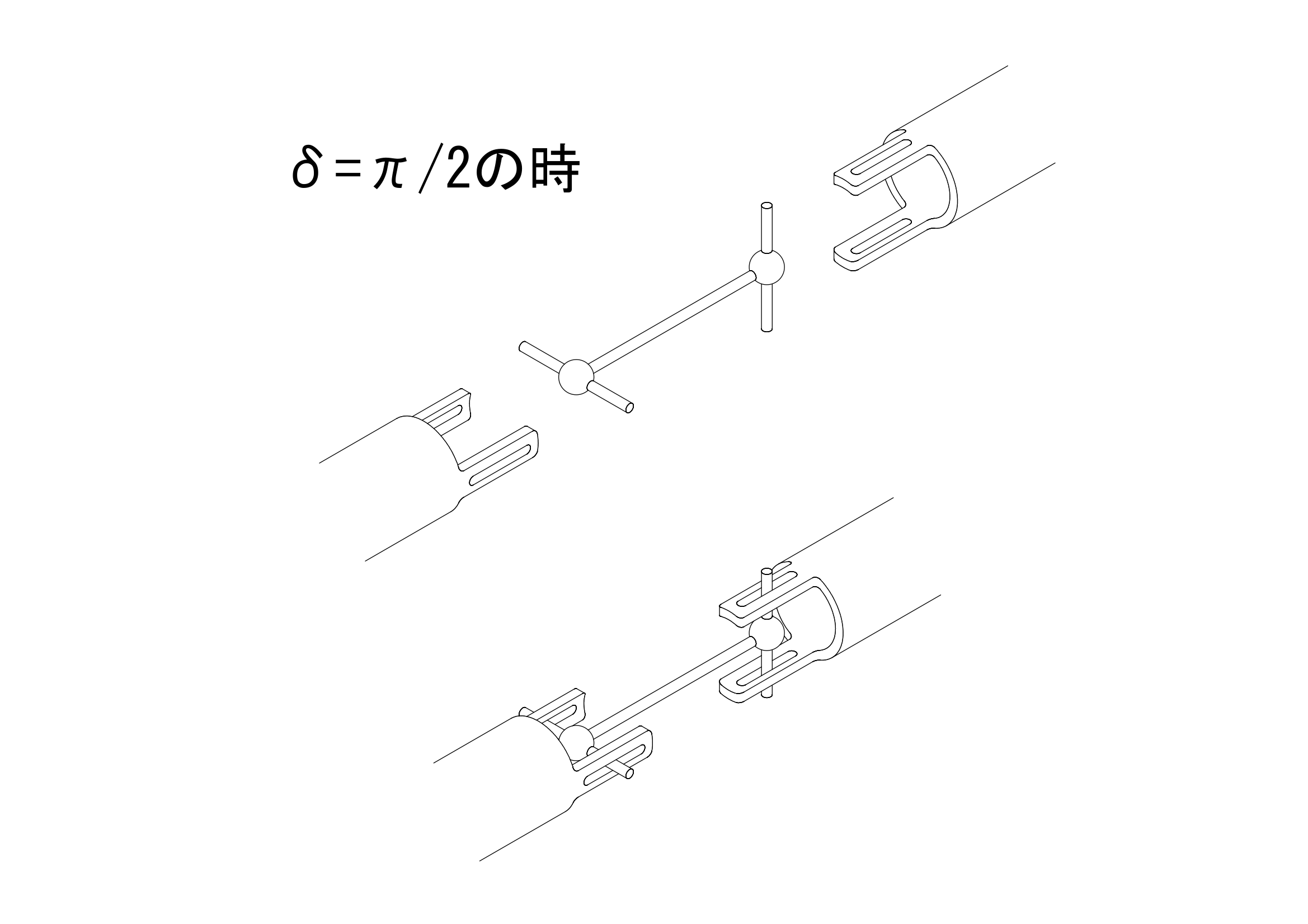
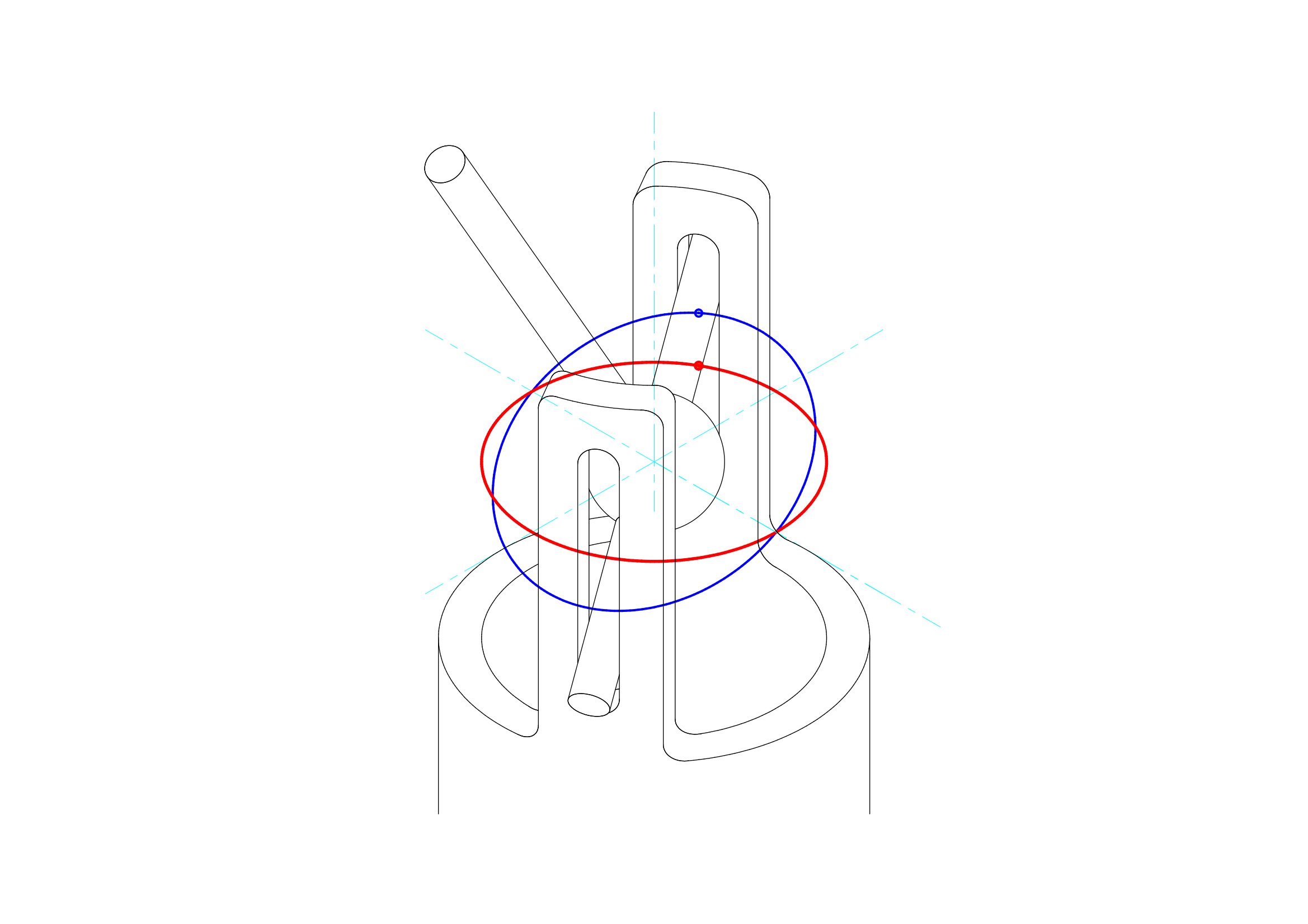
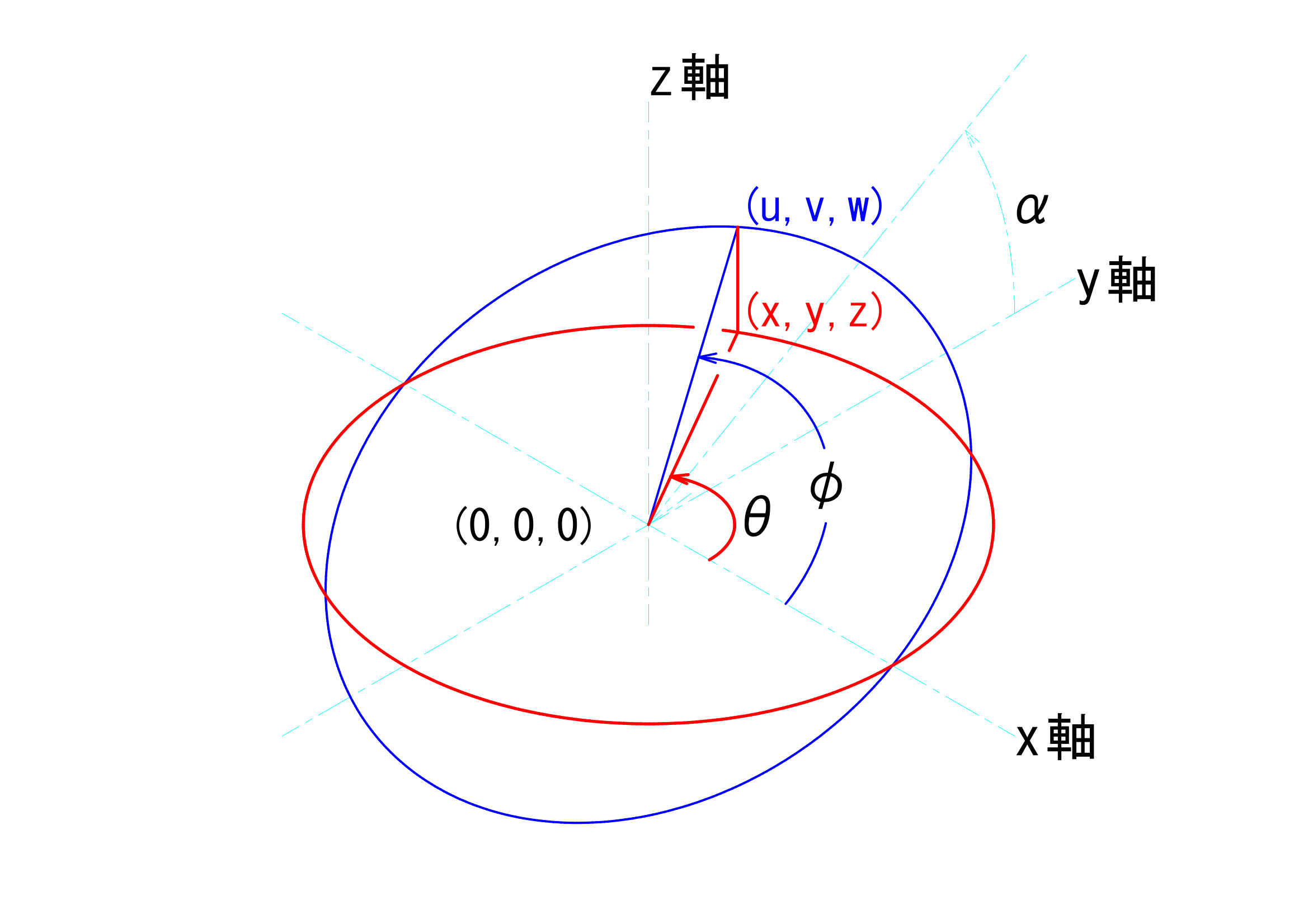
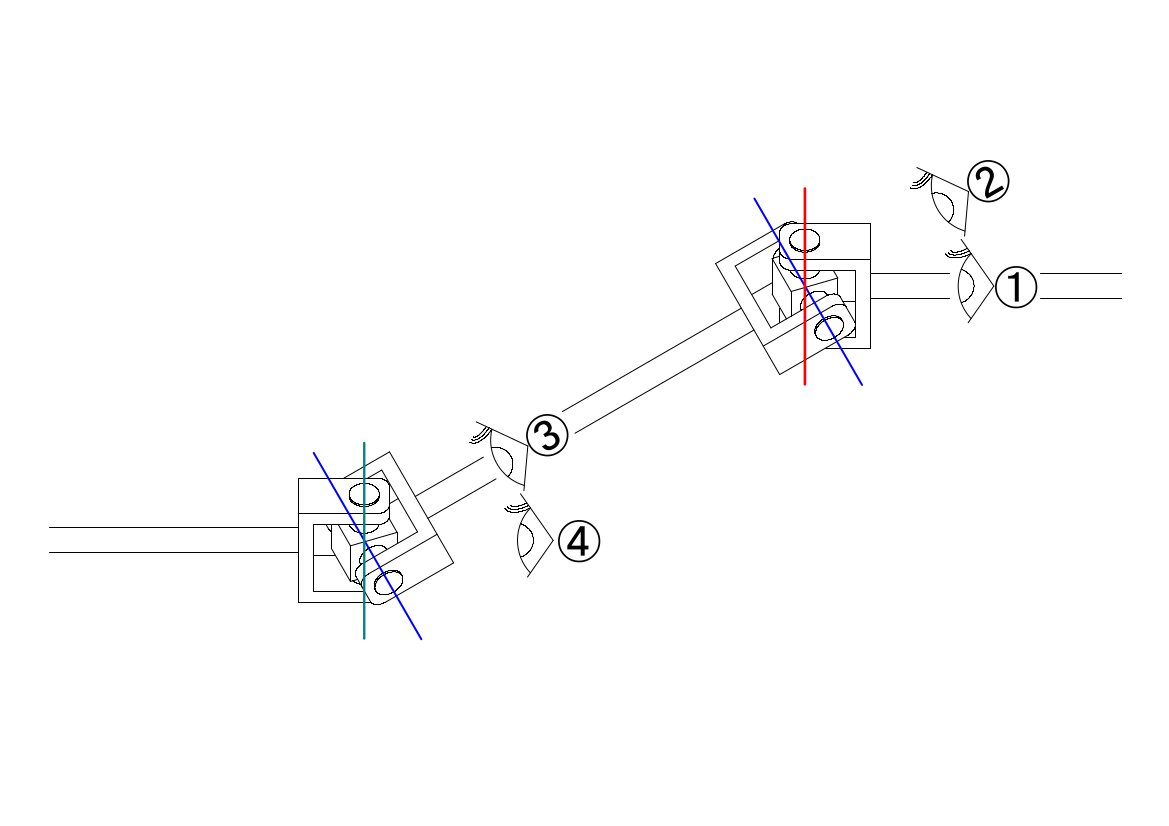
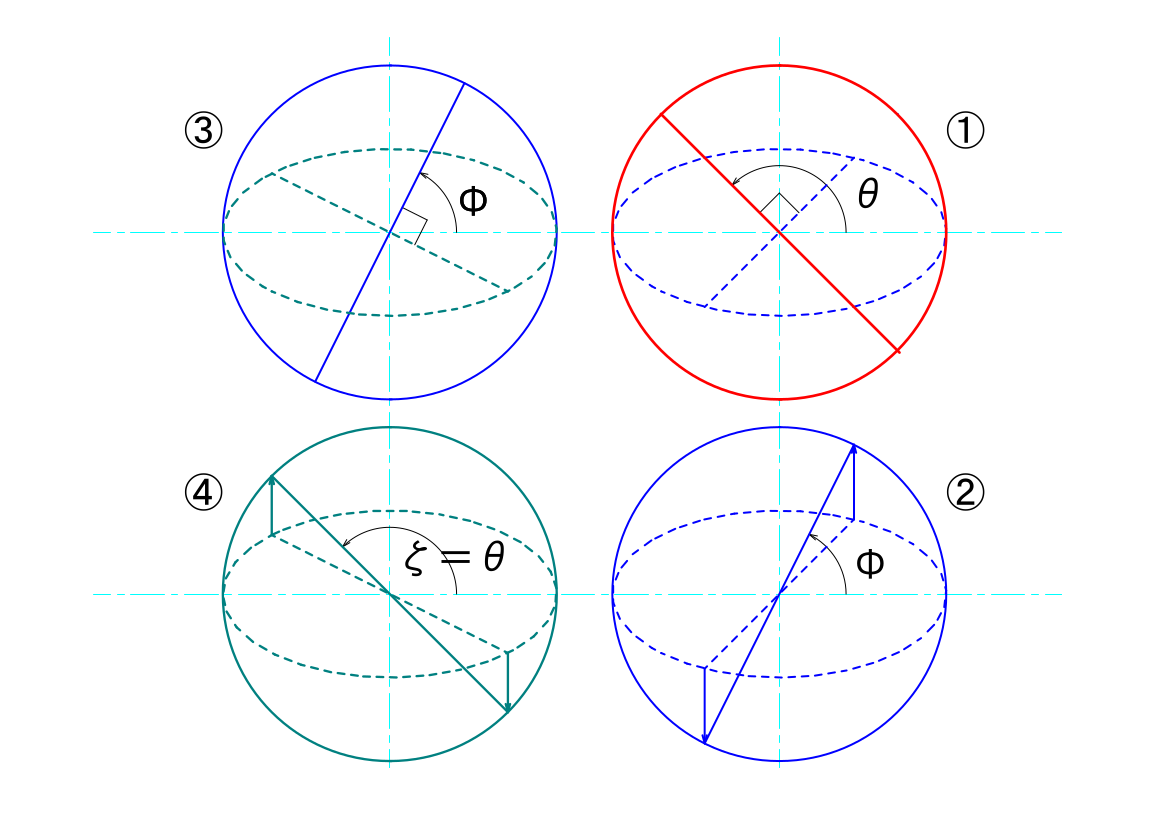
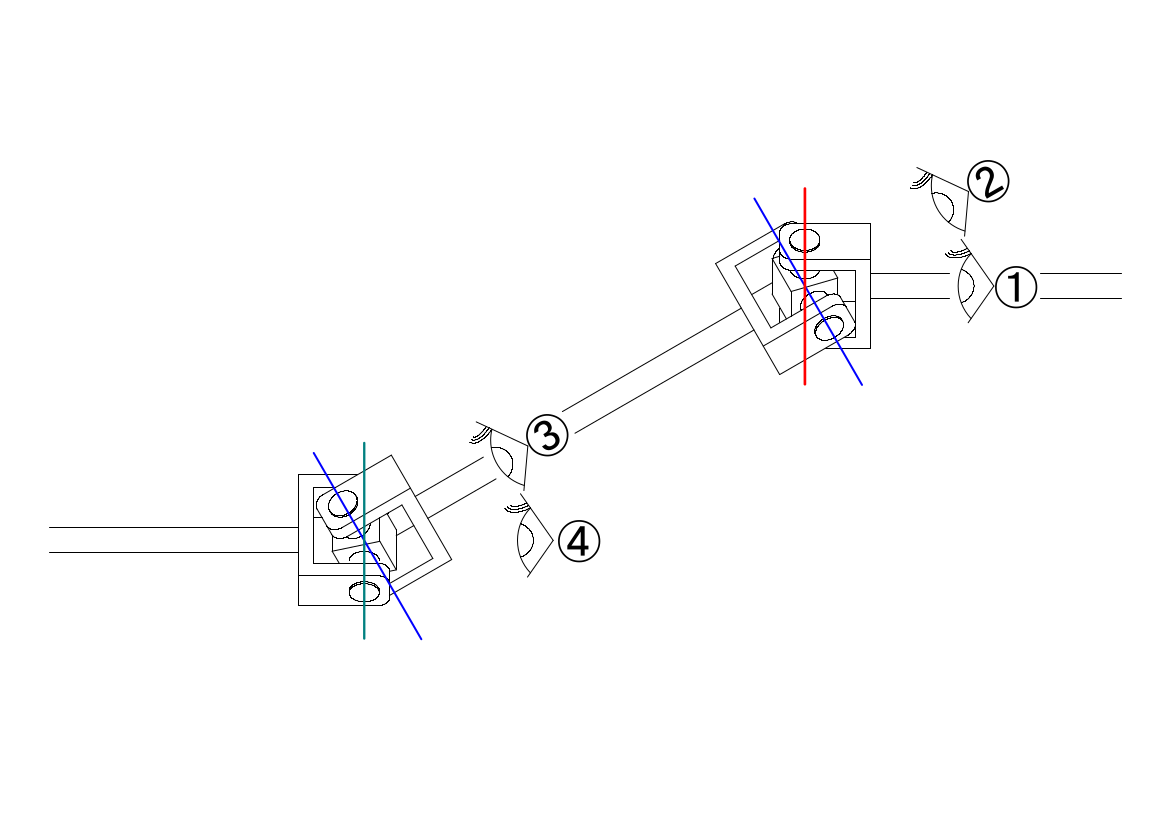
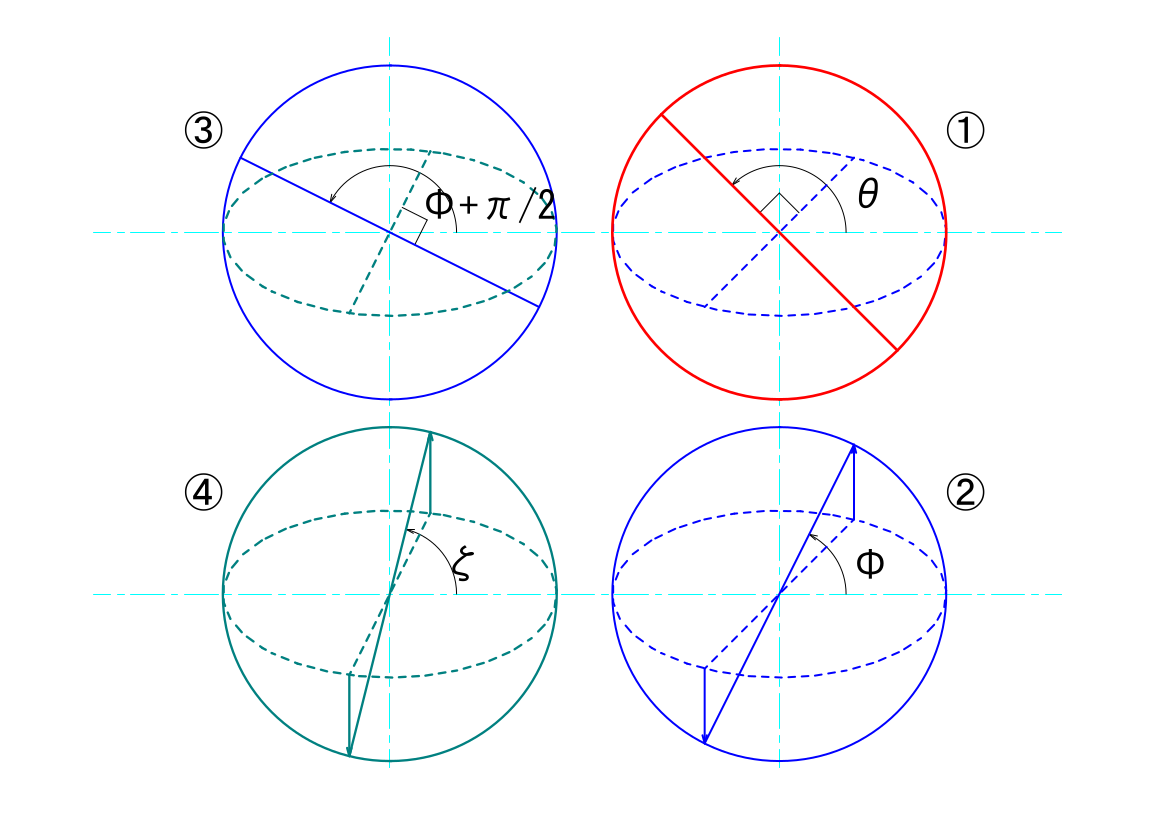
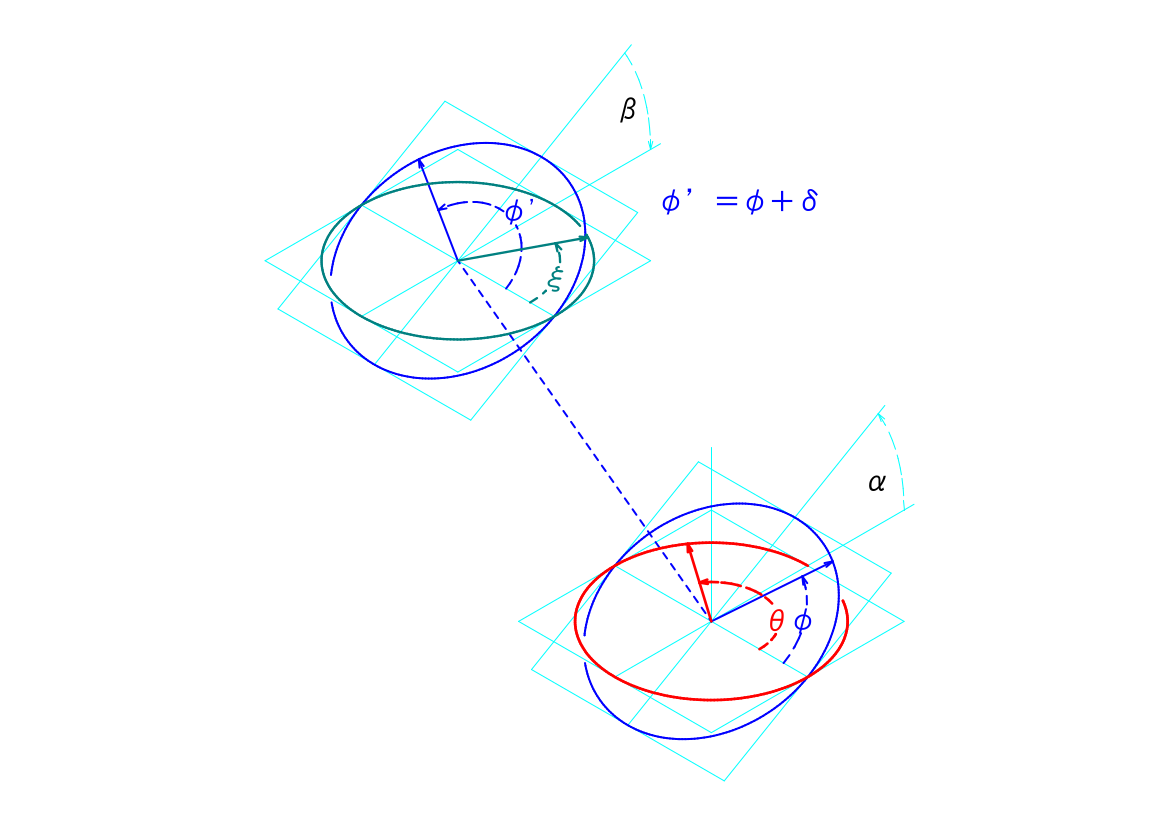
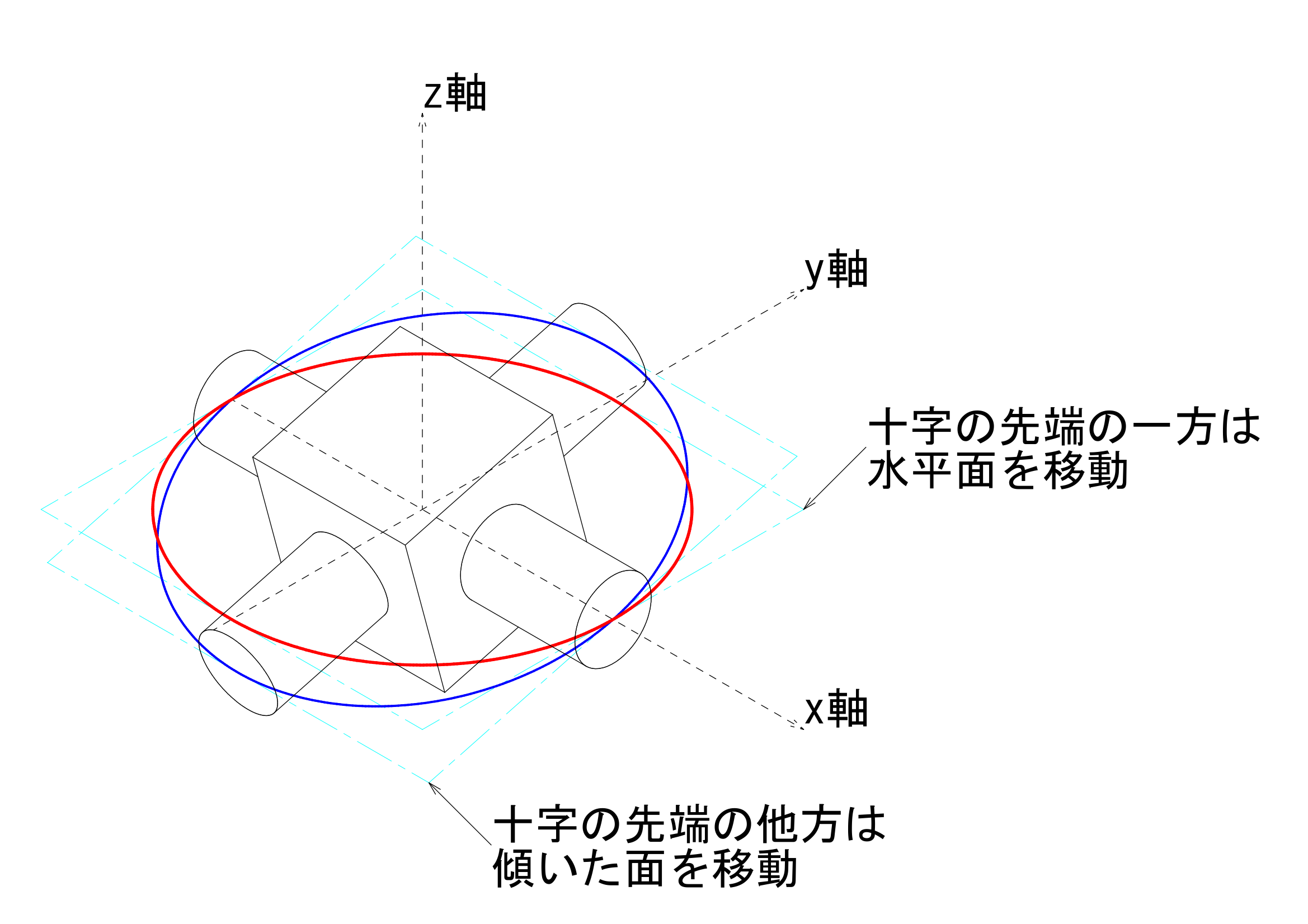
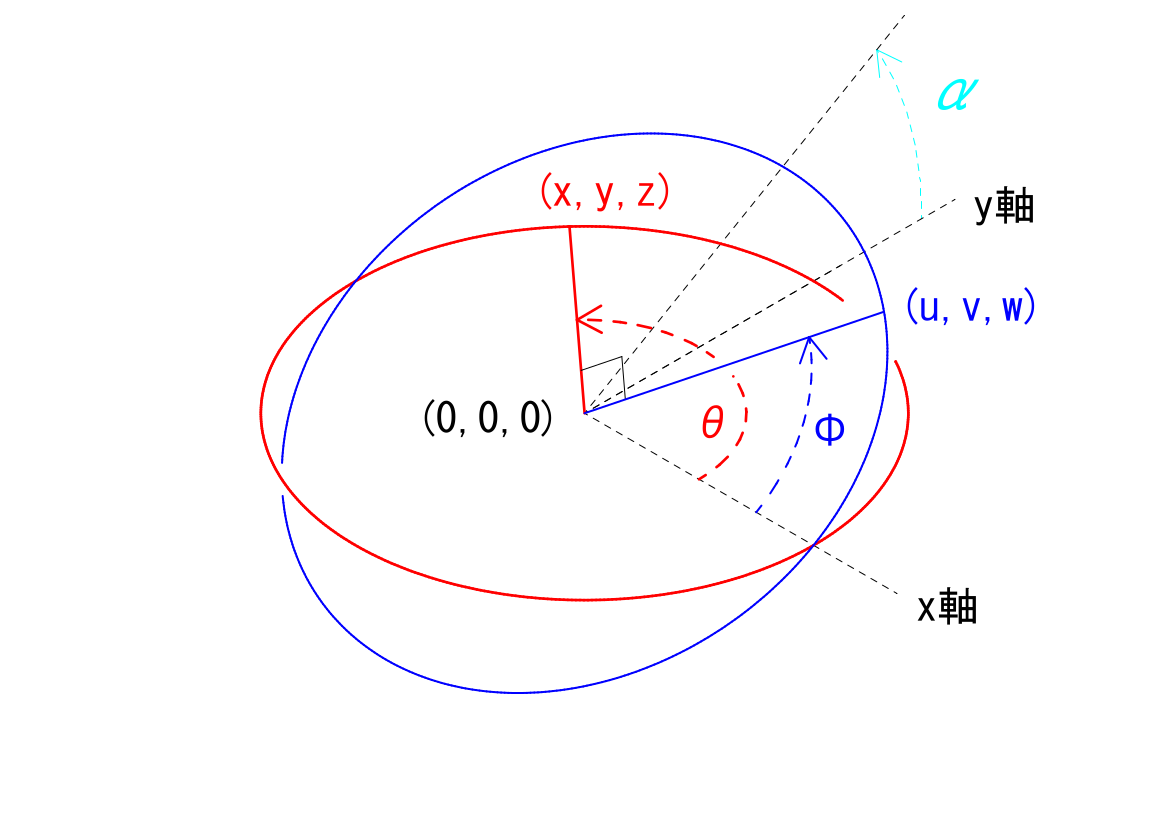
ユニバーサルジョイントの駆動面と伝達面との基準点との関係は、以下のようにあらわすことができるのでした。
\(\varphi=tan^{-1}(-\frac{1}{tan(\theta)}\cdot\frac{1}{cos(\beta)})\)
駆動面の基準点の角速度を\(\omega\)とすると、\(\theta=\omega t\)となりますので、これを上の式に代入したものを\(t\)で微分すれば、伝達面の基準点の角速度を求めることができます。
\(\frac{d\varphi}{d t}= \frac{d}{dt}tan^{-1}(-\frac{1}{tan(\omega t)}\cdot\frac{1}{cos(\alpha)})\)
合成関数\(f(g(x))\)を\(x\)について微分するには、
\(\frac{d}{d x}(f(g(x))) = \frac{d f(u)}{d u}\cdot \frac{d g(x)}{d x}\)
を求めればよいので、\(u=-\frac{1}{tan(\omega t)}\cdot\frac{1}{cos(\alpha)}\)と置くと、
\(\frac{d \varphi}{d t} = \frac{d}{d u}(tan^{-1}(u))\cdot \frac{d}{d t}(-\frac{1}{tan(\omega t)}\cdot\frac{1}{cos(\alpha)})\)
となります。
\(\frac{d}{dx}(tan^{-1}(x))=\frac{1}{1+x^2}\)ですので、
\(\frac{d}{d u}(tan^{-1}(u)) = \frac{1}{1 + u^2} = \frac{1}{1 + \frac{1}{tan^2(\omega t) \cdot cos^2 (\alpha)}}\)
\(= \frac{1}{1 + \frac{cos^2(\omega t)}{sin^2(\omega t) \cdot cos^2 (\alpha)}} = \frac{sin^2(\omega t)\cdot cos^2(\alpha)}{cos^2(\omega t) + sin^2(\omega t)\cdot cos^2(\alpha)}\)
を得ます。
次に\(\frac{d}{d t}(-\frac{1}{tan(\omega t)}\cdot\frac{1}{cos(\alpha)})\)を計算します。\(\alpha\)が定数だったとき\(\frac{d}{dx}(\alpha \cdot f(x)) =\alpha\cdot \frac{df(x)}{dx}\)ですので、
\(\frac{d}{d t}(-\frac{1}{tan(\omega t)}\cdot\frac{1}{cos(\alpha)}) = -\frac{1}{cos(\alpha)}\cdot \frac{d}{dt}(\frac{1}{tan(\omega t)})\)
上述した合成関数の微分に加え、\(\frac{d}{dx}(\frac{1}{x}) = -\frac{1}{x^2}\)、\(\frac{d }{dx}(tan(x))= \frac{1}{cos^2(x)}\)を利用すると、
\(\frac{d}{dt}(\frac{1}{tan(\omega t)}) = -\frac{1}{tan^2(\omega t) }\cdot \frac{d}{dt}(tan(\omega t))\)
\(= -\frac{1}{tan^2(\omega t) }\cdot \frac{1}{cos^2(\omega t)} \cdot \frac{d(\omega t)}{dt}\)
\(= -\frac{cos^2(\omega t)}{sin^2(\omega t) }\cdot\frac{1}{cos^2(\omega t)} \cdot \omega \)
\(= -\frac{\omega}{sin^2(\omega t)}\)
を得ます。
ここまでの結果をまとめると、
\(\frac{d\varphi}{d t} = \frac{sin^2(\omega t)\cdot cos^2(\alpha)}{cos^2(\omega t) + sin^2(\omega t)\cdot cos^2(\alpha)} \cdot -\frac{1}{cos(\alpha)}\cdot -\frac{\omega}{sin^2(\omega t)}\)
最終的に
\(\frac{d\varphi}{d t} = \frac{\omega\cdot cos(\alpha)}{cos^2(\omega t) + cos^2(\alpha)\cdot sin^2(\omega t)}\)
という式を得ます。従って、駆動面の基準点の角速度\(\omega\)に対する伝達面の基準点の角速度の比は、
\(\frac{cos(\alpha)}{cos^2(\omega t) + cos^2(\alpha)\cdot sin^2(\omega t)}\)
となります。
\(sin^2(\alpha)+cos^2(\alpha) =1\)であったことを利用すると、
\(cos^2(\omega t) + cos^2(\alpha)\cdot sin^2(\omega t) \)
\(= cos^2(\omega t) + sin^2(\omega t) – sin^2(\omega t) + cos^2(\alpha)\cdot sin^2(\omega t)\)
\(= 1 – sin^2(\omega t) (1 – cos^2(\alpha))\)
\(= 1- sin^2(\omega t)\cdot sin^2(\alpha)\)
と変形でき、上記の角速度の比は
\(\frac{cos(\alpha)}{1- sin^2(\omega t)\cdot sin^2(\alpha)}\)
と表現することも可能です。これがWikipedia等に掲載されている式となります。