前回のまとめの投稿 で、本質的に書くべきことはすべて網羅したと大見えを切りましたが、マーフィーの法則よろしく、一つ重要なことを見落としていたことに気づきました。
MPギアの解析の際に、「左右対称なので、同じ条件で解析できる」ということを述べました。確かに、左右のそれぞれのユニバーサルジョイント単体の挙動は同じ条件で解析できるのですが、そもそもモーターの左右のユニバーサルジョイントのモーター側の基準点の位相が揃っているか、を考慮しなければなりませんでした。
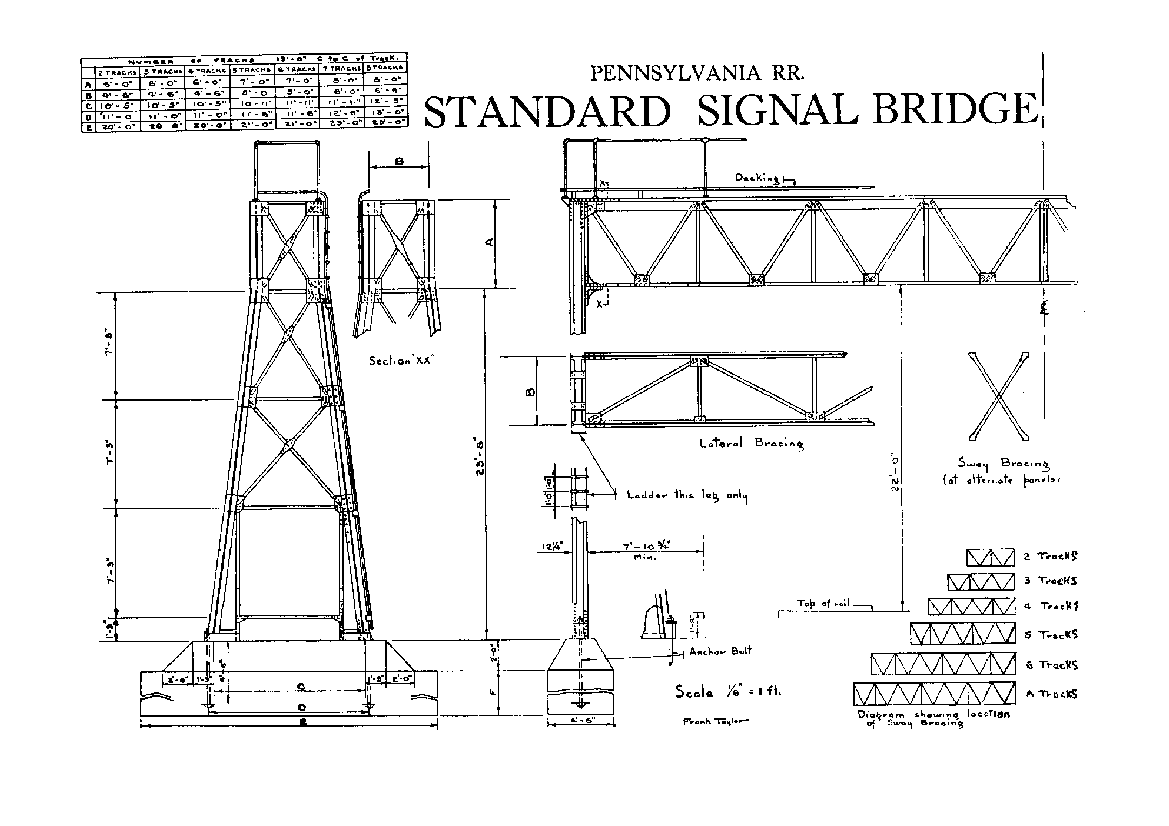
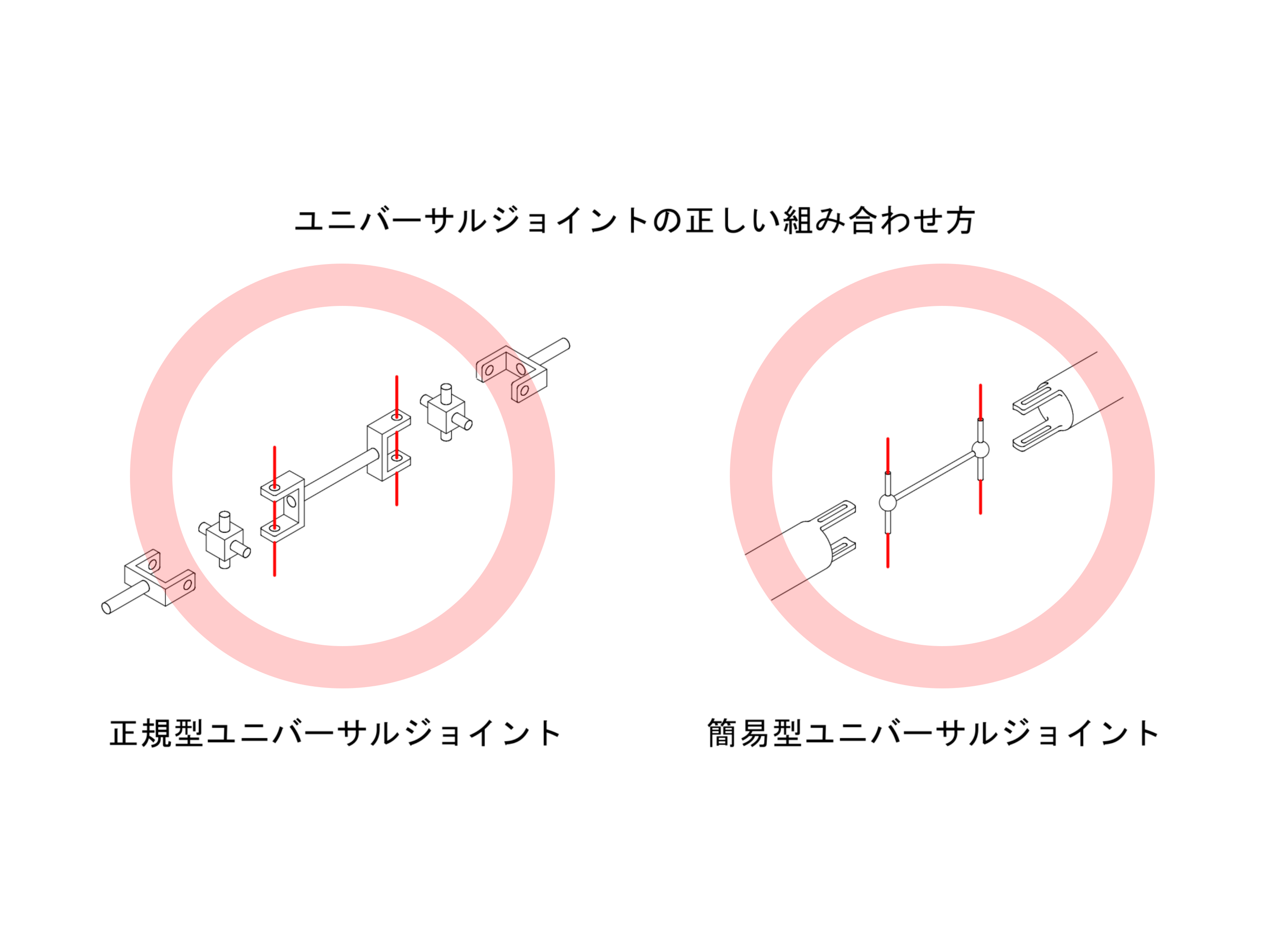
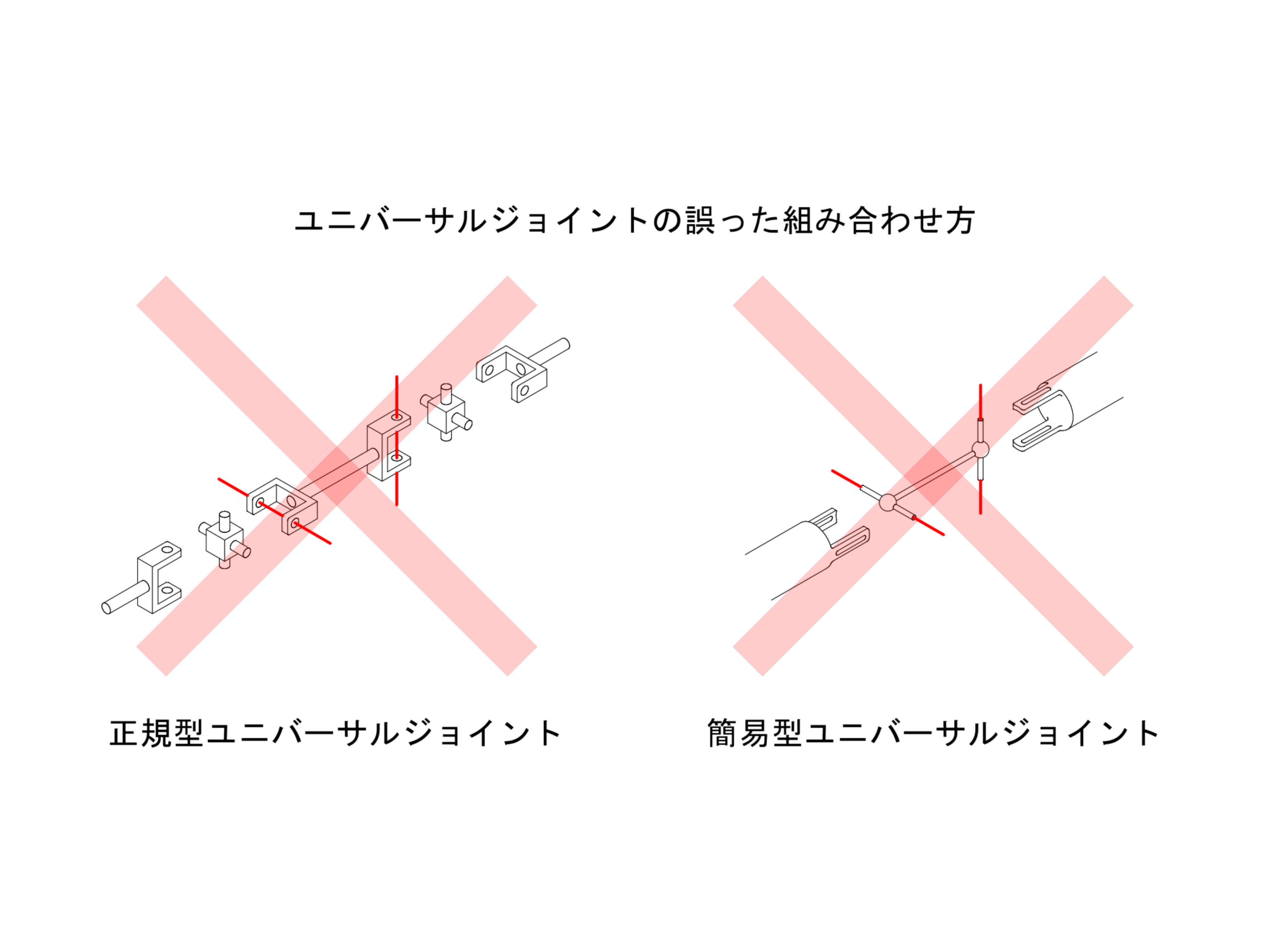
ここまでの議論は、下図左側に示したように、モーター側のジョイントの位相が揃っていることを前提にしたものでした。しかしながら、下図右側に示したように、この位相が揃っていない場合も考えられます。今回は、この位相差\(\Delta\)がモーターの左右ユニバーサルジョイントの最終伝達面の角速度にどのような影響を与えるかを解析してみます。
今回の議論では、通常のMPギア、つまりジョイントは完全に左右対称の位置にあり、3つの軸が同一平面上にある場合についてのみ議論します。Shayのようにジョイントの位置が左右対称にない場合、ユニバーサルジョイントを構成する3つの軸が同一平面上にない場合、についても同様の議論が成り立ち、同じ傾向と示すと考えられます。
モータに向かって左側のユニバーサルジョイントの駆動面の基準点が角速度\(\omega\)で回転する場合、\(\omega\)に対する最終伝達面の角速度の比は、以前求めた ように
\(\frac{cos(\alpha)\cdot cos(\beta) }{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (cos(\omega t)\cdot cos(\delta)-sin(\omega t)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}\)
で計算できます。
左側のユニバーサルジョイントの回転方向に向かって、右側のユニバーサルジョイントの駆動面の基準点の位相が、\(\Delta\)進んでいるとします。右側のユニバーサルジョイントの角速度は\(-\omega\)となりますので、右側のユニバーサルジョイントの最終駆動面の角速度比は次の式で表すことができます。なお議論を簡単にするために、\(\delta\)は、左右のユニバーサルジョイントで同じ、つまり左右のユニバーサルジョイントの位相はどちらも正しい、あるいはどちらも間違っている、ということを前提とします。
\(\frac{cos(\alpha)\cdot cos(\beta) }{cos^2(-\omega t-\Delta)+sin^2(-\omega t-\Delta)\cdot {cos}^2(\alpha) – (cos(-\omega t-\Delta)\cdot cos(\delta)-sin(-\omega t-\Delta)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}\)
\(cos(-x)=cos(x)\)、\(sin(-x)=-sin(x)\)ですので、上記の式は
\(\frac{cos(\alpha)\cdot cos(\beta) }{cos^2(\omega t+\Delta)+sin^2(\omega t+\Delta)\cdot {cos}^2(\alpha) – (cos(\omega t+\Delta)\cdot cos(\delta)+sin(\omega t+\Delta)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}\)
となります。
これらの2つの式から、左側のユニバーサルジョイントの最終伝達面の角速度に対する右側の加速度ユニバーサルジョイントの最終伝達面の角速度の比は
\(\frac{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (cos(\omega t)\cdot cos(\delta)-sin(\omega t)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}{cos^2(\omega t+\Delta)+sin^2(\omega t+\Delta)\cdot {cos}^2(\alpha) – (cos(\omega t+\Delta)\cdot cos(\delta)+sin(\omega t+\Delta)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}\)
で表すことができます。
この式は、動力の左右にユニバーサルジョイントで動力を伝動する場合、 左右それぞれのユニバーサルジョイントで発生する角速度の変動に加え、左右のユニバーサルジョイントの最終伝達面の角速度の差が発生しうる、 ということを言っています。これは、どちらか一方の動力が速く(遅く)回転しようとしているのに、一方の動力はそれを妨げる方向に働くということを意味しており、この比が大きいと、動力伝達の効率を低下させ、スムーズな挙動に影響があると考えられます。
前回までの議論では、\(\Delta=0\)を前提としているのでした。これを上記に代入すると
\(\frac{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (cos(\omega t)\cdot cos(\delta)-sin(\omega t)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (cos(\omega t)\cdot cos(\delta)+sin(\omega t)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}\)
となります。いつものように、我々の興味のあるのは、\(\delta=0\)、もしくは\(\delta=\frac{\pi}{2}\)の場合です。
\(\delta=0\)の時、\(sin(\delta)=0\)、\(cos(\delta)=1\)ですので、上記の式は、
\(\frac{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (cos(\omega t)\cdot cos(\delta))^2\cdot{sin}^2(\beta)}{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (cos(\omega t)\cdot cos(\delta))^2\cdot{sin}^2(\beta)}=1\)
となります。また、\(\delta=\frac{\pi}{2}\)の時、\(sin(\delta)=1\)、\(cos(\delta)=0\)ですので、上記の式は、
\(\frac{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (-sin(\omega t)\cdot cos(\alpha))^2\cdot{sin}^2(\beta)}{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (sin(\omega t)\cdot cos(\alpha))^2\cdot{sin}^2(\beta)}=1\)
となります。従って、\(\Delta=0\)の時、ユニバーサルジョイントの左右の最終伝達面の角速度比は同じであるということが確認できました。この結果は、\(\Delta=0\)の時、左右の挙動は左右対称で同じに解析できるという、これまで暗黙に仮定を置いてきたことを裏付けるものです。
\(\Delta=\frac{\pi}{2}\)とすると、ユニバーサルジョイントの左右の最終伝達面の角速度比は、
\(\frac{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (cos(\omega t)\cdot cos(\delta)-sin(\omega t)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}{cos^2(\omega t+\frac{\pi}{2})+sin^2(\omega t+\frac{\pi}{2})\cdot {cos}^2(\alpha) – (cos(\omega t+\frac{\pi}{2})\cdot cos(\delta)+sin(\omega t+\frac{\pi}{2})\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}\)
\(sin(\frac{\pi}{2}\pm\theta)=cos(\theta)\)、\(cos(\frac{\pi}{2}\pm\theta)=\mp sin(\theta)\)、ですので、
\(\frac{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – (cos(\omega t)\cdot cos(\delta)-sin(\omega t)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}{sin^2(\omega t)+cos^2(\omega t)\cdot {cos}^2(\alpha) – (sin(\omega t)\cdot cos(\delta)-cos(\omega t)\cdot cos(\alpha)\cdot sin(\delta))^2\cdot{sin}^2(\beta)}\)
となります。
\(\delta=0\)の時、上記の式は
\(\frac{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – {cos}^2(\omega t)\cdot{sin}^2(\beta)}{sin^2(\omega t)+cos^2(\omega t)\cdot {cos}^2(\alpha) – {sin}^2(\omega t)\cdot{sin}^2(\beta)}\)
となり、\({sin}^2(\theta)+{cos}^2(\theta)=1\)を利用すると
\(\frac{cos^2(\omega t)\cdot{cos}^2(\beta)+sin^2(\omega t)\cdot {cos}^2(\alpha)}{sin^2(\omega t)\cdot{cos}^2(\beta)+cos^2(\omega t)\cdot {cos}^2(\alpha)}\)
と整理できます。
\(\delta=\frac{\pi}{2}\)の時、上記の式は
\(\frac{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha) – {sin}^2(\omega t)\cdot {cos}^2(\alpha)\cdot{sin}^2(\beta)}{sin^2(\omega t)+cos^2(\omega t)\cdot {cos}^2(\alpha) -{cos}^2(\omega t)\cdot{cos}^2(\alpha)\cdot{sin}^2(\beta)}\)
\(=\frac{cos^2(\omega t)+sin^2(\omega t)\cdot {cos}^2(\alpha)\cdot{cos}^2(\beta)}{sin^2(\omega t)+cos^2(\omega t)\cdot {cos}^2(\alpha)\cdot{cos}^2(\beta)}\)
となります。
これらの2つの式は、\(\Delta=\frac{\pi}{2}\)の場合、左右の動力で角速度の差が確実に発生するということを言っています。
次回は、どの程度の角速度の差が左右で発生するかをこれらの式に具体的な数字を入れて見てみたいと思います。